[{"id":617618997616,"handle":"everything-but-sales-gift-card-new-products-insurance-2","title":"Everything but Gift Card, New Products, Insurance,3DR,DJI","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003cp\u003eEverything but Gift Card, New Products, Insurance\u003c\/p\u003e","published_at":"2024-11-22T15:59:13-08:00","sort_order":"best-selling","template_suffix":"","disjunctive":false,"rules":[{"column":"type","relation":"not_equals","condition":"Gift Cards \u0026 Codes"},{"column":"type","relation":"not_equals","condition":"Protection"},{"column":"vendor","relation":"not_equals","condition":"3DR"},{"column":"vendor","relation":"not_equals","condition":"DJI"}],"published_scope":"global"},{"id":162113912915,"handle":"everything-sans-dji-and-nbd","title":"Everything sans DJI, Insta 360, NBD","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eEverything sans DJI, Insta 360, NBD\u003c\/h2\u003e","published_at":"2020-09-27T00:23:54-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"NewBeeDrone"},{"column":"vendor","relation":"not_equals","condition":"DJI"},{"column":"vendor","relation":"not_equals","condition":"Insta360"},{"column":"type","relation":"not_equals","condition":"Insurance"}],"published_scope":"global"},{"id":162114011219,"handle":"everything-sans-newbeedrone","title":"Everything sans NewBeeDrone","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eEverything sans NewBeeDrone\u003c\/h2\u003e","published_at":"2020-09-27T00:23:54-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"NewBeeDrone"}],"published_scope":"global"},{"id":278059647059,"handle":"everything-sans-dji","title":"Everything sans DJI","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eEverything sans DJI\u003c\/h2\u003e","published_at":"2023-11-23T15:18:37-08:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"DJI"}],"published_scope":"global"},{"id":272590831699,"handle":"everything-sans-sales","title":"Everything sans Sales","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eEverything sans Sales\u003c\/h2\u003e","published_at":"2022-10-24T20:04:40-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"is_price_reduced","relation":"is_not_set","condition":""}],"published_scope":"global"},{"id":261439520851,"handle":"all-new-arrivals","title":"All New Arrivals","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eAll New Arrivals\u003c\/h2\u003e","published_at":"2021-08-20T17:56:07-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"title","relation":"not_contains","condition":"placeholder"},{"column":"title","relation":"not_contains","condition":"Order Protection"}],"published_scope":"global"},{"id":277671444563,"handle":"all-drones-and-drone-parts","title":"All Drones and Drone Parts","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eAll Drones and Drone Parts\u003c\/h2\u003e","published_at":"2023-11-08T15:38:04-08:00","sort_order":"created-desc","template_suffix":"","disjunctive":true,"rules":[{"column":"type","relation":"equals","condition":"Consumer Drones"},{"column":"type","relation":"equals","condition":"Enterprise Drones"},{"column":"type","relation":"equals","condition":"FPV Drones BNF \u0026 RTF"},{"column":"type","relation":"equals","condition":"Antennas"},{"column":"type","relation":"equals","condition":"Drone Cables"},{"column":"type","relation":"equals","condition":"Drone FC+ESC"},{"column":"type","relation":"equals","condition":"Drone Frames"},{"column":"type","relation":"equals","condition":"Drone GPS \u0026 Buzzer \u0026 Remote ID"},{"column":"type","relation":"equals","condition":"Drone Motors"},{"column":"type","relation":"equals","condition":"Drone Other"},{"column":"type","relation":"equals","condition":"Drone PMU"},{"column":"type","relation":"equals","condition":"Drone Propellers"},{"column":"type","relation":"equals","condition":"Drone Receivers"},{"column":"type","relation":"equals","condition":"Drone VTX Camera + Systems"}],"published_scope":"global"},{"id":277671346259,"handle":"all-drone-parts","title":"All Drone Parts","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eAll Drone Parts\u003c\/h2\u003e","published_at":"2023-11-08T15:35:13-08:00","sort_order":"created-desc","template_suffix":"","disjunctive":true,"rules":[{"column":"type","relation":"equals","condition":"Drone Cables"},{"column":"type","relation":"equals","condition":"Drone FC+ESC"},{"column":"type","relation":"equals","condition":"Drone Frames"},{"column":"type","relation":"equals","condition":"Drone GPS \u0026 Buzzer \u0026 Remote ID"},{"column":"type","relation":"equals","condition":"Drone Motors"},{"column":"type","relation":"equals","condition":"Drone Other"},{"column":"type","relation":"equals","condition":"Drone Other"},{"column":"type","relation":"equals","condition":"Drone Propellers"},{"column":"type","relation":"equals","condition":"Drone Receivers"},{"column":"type","relation":"equals","condition":"Drone VTX Camera + Systems"}],"published_scope":"global"},{"id":162113290323,"handle":"all","title":"All Products","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eAll Products\u003c\/h2\u003e","published_at":"2020-09-27T00:23:29-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"type","relation":"not_equals","condition":"Product Fee"},{"column":"vendor","relation":"not_equals","condition":"Order Protection"}],"published_scope":"global"},{"id":281197248595,"handle":"government-military","updated_at":"2024-12-23T05:05:05-08:00","published_at":"2024-03-28T16:51:34-07:00","sort_order":"created-desc","template_suffix":"","published_scope":"global","title":"政府\/軍事\/工業","body_html":"\u003ch2\u003eGovernment\/Military\/Industrial\u003c\/h2\u003e"},{"id":276726612051,"handle":"new-collection","title":"New products","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eNew products\u003c\/h2\u003e","published_at":"2023-08-17T22:23:22-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"variant_price","relation":"greater_than","condition":"0"},{"column":"title","relation":"not_contains","condition":"Order Protection"}],"published_scope":"web"},{"id":261439455315,"handle":"best-selling-products","title":"Newest Products","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eNewest Products\u003c\/h2\u003e","published_at":"2021-08-20T17:48:19-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":true,"rules":[{"column":"title","relation":"contains","condition":"Best Selling"},{"column":"title","relation":"not_contains","condition":"Best Selling"}],"published_scope":"global"},{"id":261439553619,"handle":"best-selling-collection","title":"Best selling products","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eBest selling products\u003c\/h2\u003e","published_at":"2021-08-20T17:56:07-07:00","sort_order":"best-selling","template_suffix":null,"disjunctive":false,"rules":[{"column":"variant_price","relation":"greater_than","condition":"0"}],"published_scope":"global"},{"id":275820019795,"handle":"drone-gps","title":"Drone GPS \u0026 Buzzer \u0026 Remote ID","updated_at":"2024-12-23T07:45:10-08:00","body_html":"\u003ch2\u003eDrone GPS \u0026amp; Buzzer \u0026amp; Remote ID\u003c\/h2\u003e","published_at":"2023-05-29T11:19:14-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"type","relation":"equals","condition":"Drone GPS \u0026 Buzzer \u0026 Remote ID"}],"published_scope":"global","image":{"created_at":"2024-10-24T11:04:01-07:00","alt":"Drone-GPS-Buzzer-Remote-ID NewBeeDrone","width":1080,"height":1080,"src":"\/\/newbeedrone.com\/cdn\/shop\/collections\/Drone-GPS-Buzzer-Remote-ID-NewBeeDrone-51710639.jpg?v=1729793041"}},{"id":261183897683,"handle":"everything-sans-dji-insta360","title":"Everything but Sales, Bundles, DJI, Insta360, HDZero, Walksnail, Gift Card, New Products, Insurance","updated_at":"2024-12-23T08:45:21-08:00","body_html":"\u003ch2\u003eEverything but Sales, Bundles, DJI, Insta360, HDZero, Walksnail, Gift Card, New Products, Insurance\u003c\/h2\u003e","published_at":"2021-07-01T16:52:12-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"DJI"},{"column":"vendor","relation":"not_equals","condition":"Insta360"},{"column":"type","relation":"not_equals","condition":"Gift Cards"},{"column":"type","relation":"not_equals","condition":"Bundle"},{"column":"is_price_reduced","relation":"is_not_set","condition":""},{"column":"vendor","relation":"not_equals","condition":"HDZero"},{"column":"type","relation":"not_equals","condition":"Protection"},{"column":"vendor","relation":"not_equals","condition":"Walksnail"},{"column":"vendor","relation":"not_equals","condition":"3DR"}],"published_scope":"global"}]
["20230920 First","20240322","Drone_GPS Type-GPS"]
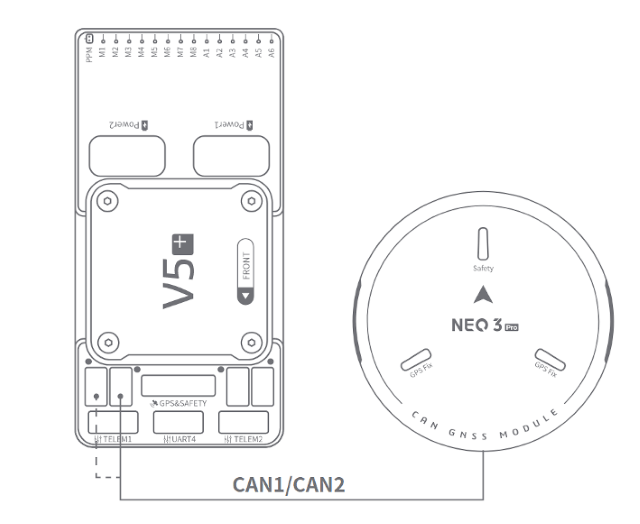
CUAV NEO 3 Pro GPS模組| GNSS U-BLOX M9N CAN 總線
NEO延續了NEO V2的硬體設計,將GNSS模組升級為Ublox NEO M9N,支援北斗、伽利略、格洛納斯和GPS同時接收,水平定位精度高達0.7M。整合安全開關、蜂鳴器、RGB燈。
![NewBeeDrone Nitro Nectar Gold 300mAh 1S HV LiPo Battery (4 Battery) - NewBeeDrone]() 特價中
特價中
$ 24.99
$ 16.99