3DR
3DR MRO KITCAN
3DR MRO KITCAN
The 3DR MRO KITCAN is a powerful and versatile kit designed for advanced robotics and UAV applications. This kit features the highly accurate RM3100 Compass, known for its unmatched precision, and the DSP310 Barometric Pressure Sensor for reliable altitude measurements. With just 4 wires, the MRO KITCAN uses CAN connectivity to provide a clean and efficient setup.
The MRO KITCAN also supports GPS and I2C ports compatible with all legacy uBlox GPS sensors, making it an excellent choice for users seeking compatibility and high performance. Additionally, its firmware supports Airspeed Sensors via I²C, ensuring seamless integration with a variety of systems. The kit includes an RGB LED and an Arm Switch/Button for added functionality, making the 3DR MRO KITCAN a comprehensive solution for complex robotic and UAV applications.
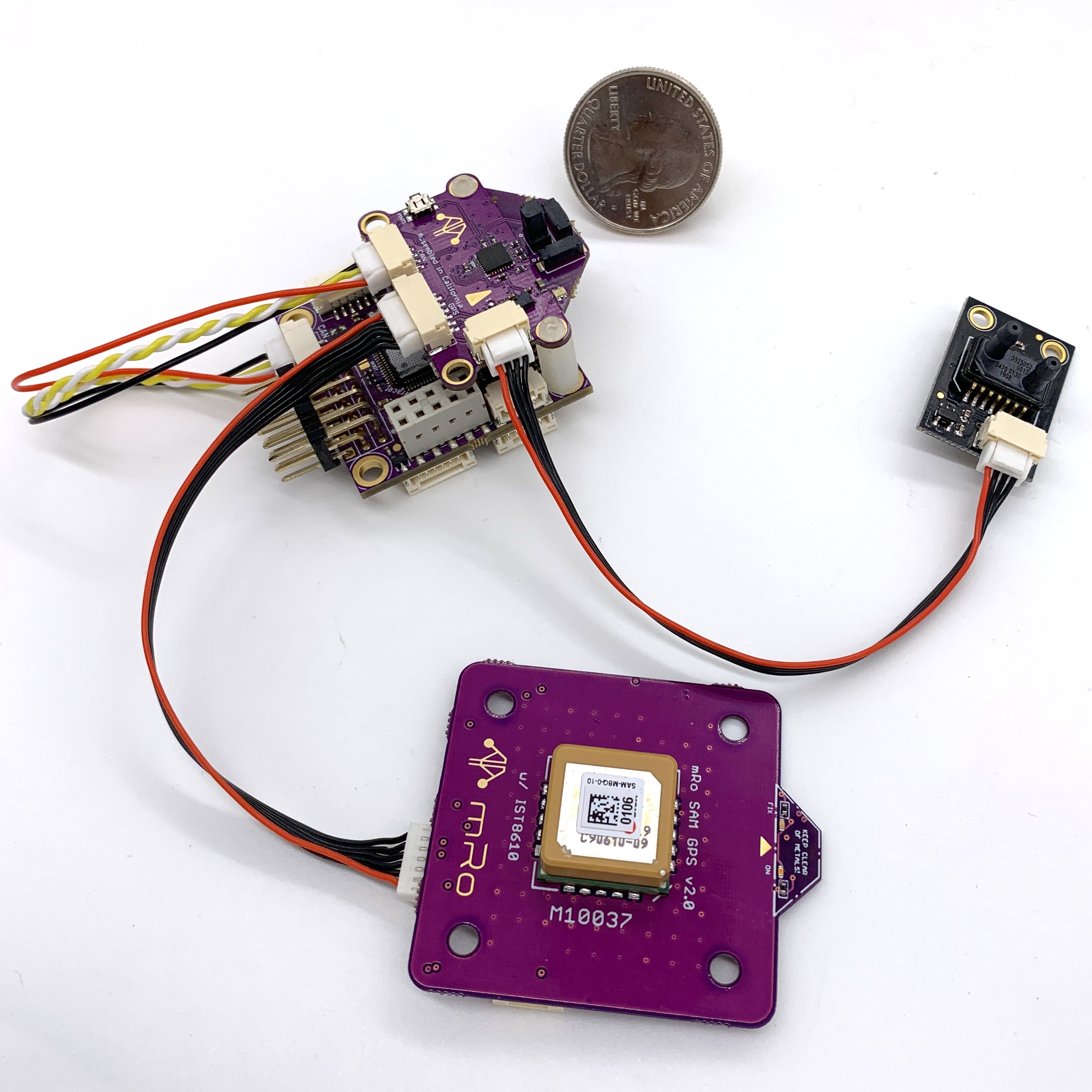
The idea is to allow the system integrator to mount all the sensors as far as possible (usually in the front of the fuselage or the tip of the wing) and run a single CAN cable to autopilot for a clean and robust setup. Or it can all be mounted together as follows:
Please go to 3DR docs site for more info.
[Quickstart]
Make sure you are using the latest version of Mission Planner. With the following firmware versions or newer:
ArduPlane >= V4.0.5
ArduCopter >= V4.0.3
ArduRover >= V4.0.0
Go to Full Parameter Tree on Mission Planner and verify those are enabled (some firmware versions are enabled by default, others are not)
CAN_P1_DRIVER - > 1
GPS_TYPE -> 9 UAVCAN
Then, make sure the UAVCAN compass driver is not disabled (UAVCAN should be unchecked). If your controller has more than 3 internal compasses, you should disable the least important one:
COMPASS_TYPEMASK->UAVCAN (Unchecked)
Connect your mRo Location One to your controller via CAN and Restart.
NTF_LED_TYPE -> UAVCAN->Checked (Only if you want the RGB enabled)
If you want to enable the I2C airspeed, on the autopilot/controller parameters via Mission Planner set:
ARSP_TYPE -> 8 UAVCAN
Then you must access your mRo Location One CAN parameters. To do so, follow these steps:
Mission Planner->Initial Setup->Optional Hardware->UAVCAN-> SLCan Mode CAN1 (or 2) -> Parameters
1 min later inside the CAN Parameters, change the following:
ARSP_TYPE -> 1
For mRo I2C Airspeed Sensor JST-GH MS4525DO
ARSP_TYPE -> 4
For mRo Next-Gen MS5525 Airspeed Sensor
Write and reboot. Enjoy!
*Remember that mRo X2.1 Red Board has the CAN signal H and L crossover. MCU:
STM32F303 ARM Microcontroller
Distances between holes (center to center): 14mm x 31.5mm
Holes diameter: 3.2mm
{kind=link}