Contrôleur de vol pour drone CUAV Pixhawk V5+ | Pilote automatique de drone PX4 APM
Pilote automatique V5+
Standardisation d'interface, interface E/S riche
Description du produit /Contrôleur de vol V5+
Contrôleur de vol V5+
V5+® est un pilote automatique avancé conçu par CUAV® et l'équipe PX4 et fabriqué par CUAV. Il est basé sur la norme de conception Pixhawk FMUv5 et est parfaitement compatible avecPX4etArduPilotmicrologiciel.
Précédent
Suivant
Processeur F765 plus rapide
V5+ sélectionne le processeur STM32F765 avec de meilleures performances. Sa fréquence principale est jusqu'à 216 MHz et il contient 2 Mo de FLASH/512 Ko de RAM. La vitesse d'horloge est plus élevée, la RAM est plus grande et la vitesse sera grandement améliorée.
Nouvelle conception matérielle FMUv5
Le V5+ est un système de contrôle de vol hautes performances créé par CUAV et basé sur le matériel open source FMUv5. Il dispose d'un processeur plus avancé que le FMUv3, d'une mémoire FLASH et RAM plus grande et d'un capteur plus stable et plus fiable.
Prise en charge du positionnement centimétrique RTK
V5+ prend en charge le module de positionnement RTK pour obtenir un positionnement précis au centimètre près afin de répondre à vos exigences de positionnement les plus élevées. (Le module de positionnement RTK doit être acheté séparément)
Norme officielle PX4
CUAV est un membre premium de Dronecode et travaille à la promotion du projet open source PX4. L'interface V5+ est conçue selon la norme officielle PX4 pour assurer la compatibilité et l'interopérabilité avec les produits matériels et logiciels de l'écosystème PX4.
Combinaison de redondance multi-capteurs
Intégré à 5 ensembles de capteurs, le contrôleur de vol surveille les données des capteurs multicanaux en temps réel et effectue une commutation redondante immédiatement après la panne, améliorant ainsi la sécurité et la stabilité du vol.
Spécifications /Contrôleur de vol V5+
Paramètre matériel
Processeur principal
STM32F765 (Arm® Cortex®-M7 32 bits, 216 MHz, 2 Mo de mémoire flash, 512 Ko de RAM)
Coprocesseur
STM32F100 (Arm® Cortex®-M3 32 bits, 24 MHz, 8 Ko de SRAM)
capteur
Accéléromètre
ICM-20602/ICM-20689/BMI055
Gyro
ICM-20602/ICM-20689/BMI055
Boussole électronique
IST8310
Baromètre
MS5611
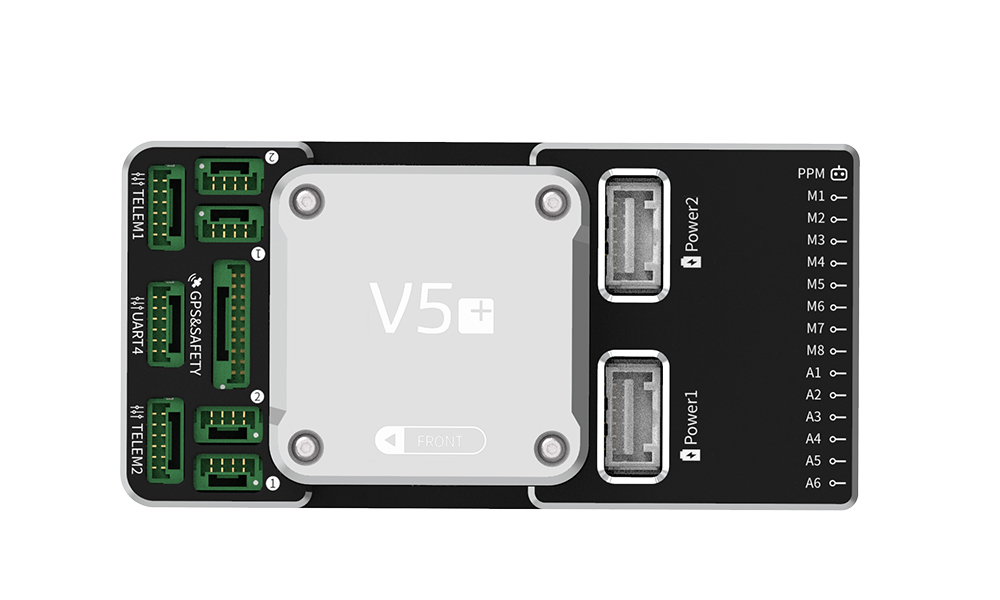
Interface externe
Port série UART
5
I2C
4
SPI
1
PEUT
2
ADC
2
Sortie PWM
8 à 14 sorties PWM (6 depuis IO, 8 depuis FMU)
DSM/SBUS/RSSI
1
PPM EN
1
Bus CAN
2
Entrées analogiques pour tension/courant
2
GPS et sécurité
1
Interface SWD de débogage/F7
1
Interface USB
1 (Type C)
Emplacement TF
1
Protocole d'interface associé
PPM EN
PPM
DSM/SBUS
DSM/SBUS ; RSSI : PWM/tension analogique 3,3 V
GPS
NMEA/UBLOX
Modèle de support
Micrologiciel PX4 et Ardupilot
Hélicoptère/Avion/Hélicoptère/VTOL/Véhicule sans pilote/Rover, etc.












 0
0














