[{"id":616536080752,"handle":"3dr","title":"3DR","updated_at":"2024-12-11T15:20:19-08:00","body_html":"\u003ch2\u003e3DR - NDAA product that make in USA\u003c\/h2\u003e\n\u003cp class=\"p1\"\u003eOur \u003cstrong\u003e3DR Products\u003c\/strong\u003e collection offers a premium lineup of NDAA-compliant, Made in USA components, crafted to deliver the highest standards in drone technology. Perfect for developers, hobbyists, and professionals, each 3DR product in this collection is built with precision, durability, and compatibility in mind. From high-accuracy GPS modules to sophisticated flight controllers, these American-made items are designed to ensure reliable performance and easy integration across various drone systems.\u003c\/p\u003e\n\u003cp class=\"p1\"\u003e3DR products are engineered to meet the strict demands of NDAA compliance, making them ideal for government, corporate, and personal projects where security and standards are paramount. Every component in this collection is not only manufactured in the USA but also crafted to power your drone projects with the best in innovation and reliability. So whether you’re customizing, building, or upgrading, the \u003cstrong\u003e3DR Products\u003c\/strong\u003e collection has the essential tools and components you need for secure, high-performance drone operations.\u003c\/p\u003e","published_at":"2024-10-17T12:23:15-07:00","sort_order":"alpha-asc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"equals","condition":"3DR"}],"published_scope":"global"},{"id":275819921491,"handle":"drone-fc-esc","title":"Drone FC+ESC","updated_at":"2024-12-21T22:15:18-08:00","body_html":"\u003ch2\u003eDrone FC+ESC\u003c\/h2\u003e","published_at":"2023-05-29T11:18:38-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"type","relation":"equals","condition":"Drone FC+ESC"}],"published_scope":"global"},{"id":616536211824,"handle":"ndaa-made-in-usa","title":"NDAA Made in USA","updated_at":"2024-12-11T15:20:19-08:00","body_html":"\u003ch2\u003eNDAA Made in USA\u003c\/h2\u003e\n\u003cp\u003eOur \u003cstrong\u003eNDAA Made in USA\u003c\/strong\u003e collection features top-quality, NDAA-compliant products manufactured right here in the USA. Each item in this selection is carefully chosen to meet the highest standards of compliance, reliability, and innovation, ensuring that you can fly with confidence and pride. Perfect for pilots seeking trusted, domestically produced FPV gear, this collection highlights the best equipment, from drones to essential accessories, all crafted to deliver exceptional performance while meeting regulatory standards. Fly high with confidence in your gear’s origin and compliance with the \u003cstrong\u003eNDAA Made in USA\u003c\/strong\u003e collection.\u003c\/p\u003e","published_at":"2024-10-17T12:38:42-07:00","sort_order":"alpha-asc","template_suffix":"","disjunctive":true,"rules":[{"column":"tag","relation":"equals","condition":"NDAA"}],"published_scope":"global"},{"id":276726612051,"handle":"new-collection","title":"New products","updated_at":"2024-12-22T09:20:01-08:00","body_html":"\u003ch2\u003eNew products\u003c\/h2\u003e","published_at":"2023-08-17T22:23:22-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"variant_price","relation":"greater_than","condition":"0"},{"column":"title","relation":"not_contains","condition":"Order Protection"}],"published_scope":"web"},{"id":261439455315,"handle":"best-selling-products","title":"Newest Products","updated_at":"2024-12-22T09:20:01-08:00","body_html":"\u003ch2\u003eNewest Products\u003c\/h2\u003e","published_at":"2021-08-20T17:48:19-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":true,"rules":[{"column":"title","relation":"contains","condition":"Best Selling"},{"column":"title","relation":"not_contains","condition":"Best Selling"}],"published_scope":"global"},{"id":261439553619,"handle":"best-selling-collection","title":"Best selling products","updated_at":"2024-12-22T09:20:01-08:00","body_html":"\u003ch2\u003eBest selling products\u003c\/h2\u003e","published_at":"2021-08-20T17:56:07-07:00","sort_order":"best-selling","template_suffix":null,"disjunctive":false,"rules":[{"column":"variant_price","relation":"greater_than","condition":"0"}],"published_scope":"global"},{"id":277671444563,"handle":"all-drones-and-drone-parts","title":"All Drones and Drone Parts","updated_at":"2024-12-22T08:55:38-08:00","body_html":"\u003ch2\u003eAll Drones and Drone Parts\u003c\/h2\u003e","published_at":"2023-11-08T15:38:04-08:00","sort_order":"created-desc","template_suffix":"","disjunctive":true,"rules":[{"column":"type","relation":"equals","condition":"Consumer Drones"},{"column":"type","relation":"equals","condition":"Enterprise Drones"},{"column":"type","relation":"equals","condition":"FPV Drones BNF \u0026 RTF"},{"column":"type","relation":"equals","condition":"Antennas"},{"column":"type","relation":"equals","condition":"Drone Cables"},{"column":"type","relation":"equals","condition":"Drone FC+ESC"},{"column":"type","relation":"equals","condition":"Drone Frames"},{"column":"type","relation":"equals","condition":"Drone GPS \u0026 Buzzer \u0026 Remote ID"},{"column":"type","relation":"equals","condition":"Drone Motors"},{"column":"type","relation":"equals","condition":"Drone Other"},{"column":"type","relation":"equals","condition":"Drone PMU"},{"column":"type","relation":"equals","condition":"Drone Propellers"},{"column":"type","relation":"equals","condition":"Drone Receivers"},{"column":"type","relation":"equals","condition":"Drone VTX Camera + Systems"}],"published_scope":"global"},{"id":162113290323,"handle":"all","title":"All Products","updated_at":"2024-12-22T09:20:01-08:00","body_html":"\u003ch2\u003eAll Products\u003c\/h2\u003e","published_at":"2020-09-27T00:23:29-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"type","relation":"not_equals","condition":"Product Fee"},{"column":"vendor","relation":"not_equals","condition":"Order Protection"}],"published_scope":"global"},{"id":278059647059,"handle":"everything-sans-dji","title":"Everything sans DJI","updated_at":"2024-12-22T09:20:01-08:00","body_html":"\u003ch2\u003eEverything sans DJI\u003c\/h2\u003e","published_at":"2023-11-23T15:18:37-08:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"DJI"}],"published_scope":"global"},{"id":162113912915,"handle":"everything-sans-dji-and-nbd","title":"Everything sans DJI, Insta 360, NBD","updated_at":"2024-12-22T08:55:38-08:00","body_html":"\u003ch2\u003eEverything sans DJI, Insta 360, NBD\u003c\/h2\u003e","published_at":"2020-09-27T00:23:54-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"NewBeeDrone"},{"column":"vendor","relation":"not_equals","condition":"DJI"},{"column":"vendor","relation":"not_equals","condition":"Insta360"},{"column":"type","relation":"not_equals","condition":"Insurance"}],"published_scope":"global"},{"id":162114011219,"handle":"everything-sans-newbeedrone","title":"Everything sans NewBeeDrone","updated_at":"2024-12-22T08:55:38-08:00","body_html":"\u003ch2\u003eEverything sans NewBeeDrone\u003c\/h2\u003e","published_at":"2020-09-27T00:23:54-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"NewBeeDrone"}],"published_scope":"global"},{"id":272590831699,"handle":"everything-sans-sales","title":"Everything sans Sales","updated_at":"2024-12-22T08:55:38-08:00","body_html":"\u003ch2\u003eEverything sans Sales\u003c\/h2\u003e","published_at":"2022-10-24T20:04:40-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"is_price_reduced","relation":"is_not_set","condition":""}],"published_scope":"global"},{"id":261439520851,"handle":"all-new-arrivals","title":"All New Arrivals","updated_at":"2024-12-22T09:20:01-08:00","body_html":"\u003ch2\u003eAll New Arrivals\u003c\/h2\u003e","published_at":"2021-08-20T17:56:07-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"title","relation":"not_contains","condition":"placeholder"},{"column":"title","relation":"not_contains","condition":"Order Protection"}],"published_scope":"global"},{"id":277671346259,"handle":"all-drone-parts","title":"All Drone Parts","updated_at":"2024-12-22T07:30:08-08:00","body_html":"\u003ch2\u003eAll Drone Parts\u003c\/h2\u003e","published_at":"2023-11-08T15:35:13-08:00","sort_order":"created-desc","template_suffix":"","disjunctive":true,"rules":[{"column":"type","relation":"equals","condition":"Drone Cables"},{"column":"type","relation":"equals","condition":"Drone FC+ESC"},{"column":"type","relation":"equals","condition":"Drone Frames"},{"column":"type","relation":"equals","condition":"Drone GPS \u0026 Buzzer \u0026 Remote ID"},{"column":"type","relation":"equals","condition":"Drone Motors"},{"column":"type","relation":"equals","condition":"Drone Other"},{"column":"type","relation":"equals","condition":"Drone Other"},{"column":"type","relation":"equals","condition":"Drone Propellers"},{"column":"type","relation":"equals","condition":"Drone Receivers"},{"column":"type","relation":"equals","condition":"Drone VTX Camera + Systems"}],"published_scope":"global"}]
mRo AP_Peripheral / Convertisseur CAN / RM3100 / DSP310
Concernant le prix : la moitié du prix revient au solide Compass RM3100. Cependant, après l'avoir testé, vous ne voudrez plus revenir en arrière.
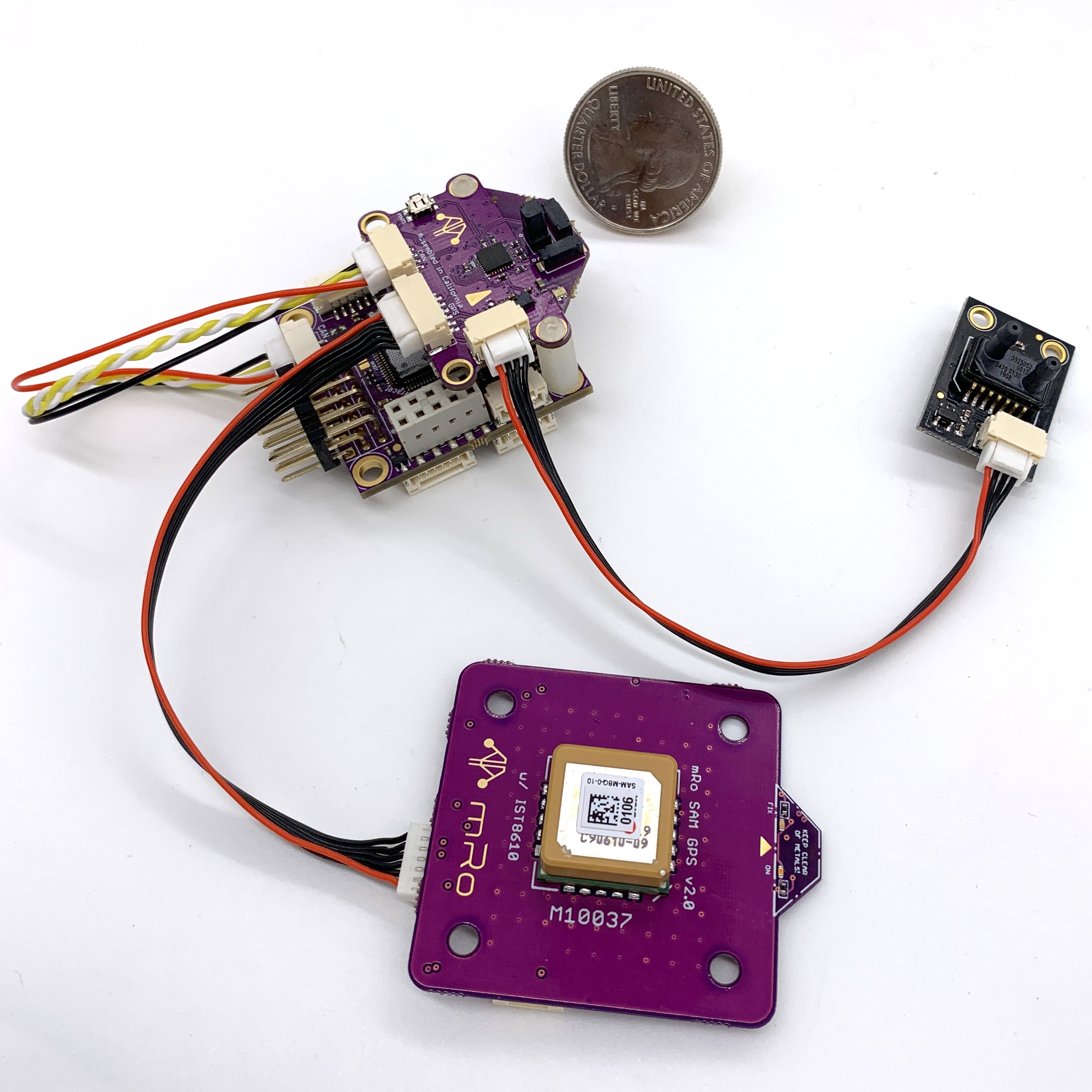
Le mRo KItCAN est un puissant kit de fonctionnalités + firmware via CAN qui s'attaque à la plupart des applications robotiques existantes. Avec seulement 4 fils [CAN], vous pouvez accéder proprement au magnétomètre le plus puissant disponible aujourd'hui, au meilleur capteur de pression barométrique que nous ayons jamais utilisé, aux ports GPS + I2C qui prennent en charge tous les capteurs GPS uBlox existants et à un firmware qui prend en charge notreCapteur de vitesse d'air(via I²C). Si cela ne suffit pas, il comprend également une LED RVB et un interrupteur/bouton d'armement.
L'idée est de permettre à l'intégrateur système de monter tous les capteurs aussi loin que possible (généralement à l'avant du fuselage ou à l'extrémité de l'aile) et de faire passer un seul câble CAN vers le pilote automatique pour une configuration propre et robuste. Ou tout peut être monté ensemble comme suit :
Accédez à l'arborescence complète des paramètres sur Mission Planner et vérifiez qu'ils sont activés (certaines versions du firmware sont activées par défaut, d'autres ne le sont pas)
CAN_P1_DRIVER - > 1 GPS_TYPE -> 9 UAVCAN
Ensuite, assurez-vous que le pilote de boussole UAVCAN n'est pas désactivé (UAVCAN doit être décoché). Si votre contrôleur possède plus de 3 boussoles internes, vous devez désactiver la moins importante :
COMPASS_TYPEMASK->UAVCAN(Non coché)
Connectez votre mRo Location One à votre contrôleur via CAN et redémarrez.
NTF_LED_TYPE -> UAVCAN->Vérifié(Uniquement si vous souhaitez que le RVB soit activé)
Si vous souhaitez activer la vitesse aérienne I2C, définissez dans les paramètres du pilote automatique/contrôleur via Mission Planner :
ARSP_TYPE -> 8 UAVCAN
Vous devez ensuite accéder aux paramètres CAN de votre mRo Location One. Pour ce faire, procédez comme suit :