[{"id":277671346259,"handle":"all-drone-parts","title":"All Drone Parts","updated_at":"2026-06-12T04:01:15-07:00","body_html":"\u003ch2\u003eAll Drone Parts\u003c\/h2\u003e","published_at":"2023-11-08T15:35:13-08:00","sort_order":"created-desc","template_suffix":"","disjunctive":true,"rules":[{"column":"type","relation":"equals","condition":"Drone Cables"},{"column":"type","relation":"equals","condition":"Drone FC+ESC"},{"column":"type","relation":"equals","condition":"Drone Frames"},{"column":"type","relation":"equals","condition":"Drone GPS \u0026 Buzzer \u0026 Remote ID"},{"column":"type","relation":"equals","condition":"Drone Motors"},{"column":"type","relation":"equals","condition":"Drone Other"},{"column":"type","relation":"equals","condition":"Drone Other"},{"column":"type","relation":"equals","condition":"Drone Propellers"},{"column":"type","relation":"equals","condition":"Drone Receivers"},{"column":"type","relation":"equals","condition":"Drone VTX Camera + Systems"}],"published_scope":"global"},{"id":277671444563,"handle":"all-drones-and-drone-parts","title":"All Drones and Drone Parts","updated_at":"2026-06-12T04:01:15-07:00","body_html":"\u003ch2\u003eAll Drones and Drone Parts\u003c\/h2\u003e","published_at":"2023-11-08T15:38:04-08:00","sort_order":"created-desc","template_suffix":"","disjunctive":true,"rules":[{"column":"type","relation":"equals","condition":"Consumer Drones"},{"column":"type","relation":"equals","condition":"Enterprise Drones"},{"column":"type","relation":"equals","condition":"FPV Drones BNF \u0026 RTF"},{"column":"type","relation":"equals","condition":"Antennas"},{"column":"type","relation":"equals","condition":"Drone Cables"},{"column":"type","relation":"equals","condition":"Drone FC+ESC"},{"column":"type","relation":"equals","condition":"Drone Frames"},{"column":"type","relation":"equals","condition":"Drone GPS \u0026 Buzzer \u0026 Remote ID"},{"column":"type","relation":"equals","condition":"Drone Motors"},{"column":"type","relation":"equals","condition":"Drone Other"},{"column":"type","relation":"equals","condition":"Drone PMU"},{"column":"type","relation":"equals","condition":"Drone Propellers"},{"column":"type","relation":"equals","condition":"Drone Receivers"},{"column":"type","relation":"equals","condition":"Drone VTX Camera + Systems"}],"published_scope":"global"},{"id":261439520851,"handle":"all-new-arrivals","title":"All New Arrivals","updated_at":"2026-06-12T14:37:32-07:00","body_html":"\u003ch2\u003eAll New Arrivals\u003c\/h2\u003e","published_at":"2021-08-20T17:56:07-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"title","relation":"not_contains","condition":"placeholder"},{"column":"title","relation":"not_contains","condition":"Order Protection"},{"column":"vendor","relation":"not_equals","condition":"Route"}],"published_scope":"global"},{"id":162113290323,"handle":"all","title":"All Products","updated_at":"2026-06-12T14:37:32-07:00","body_html":"\u003ch2\u003eAll Products\u003c\/h2\u003e","published_at":"2020-09-27T00:23:29-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"type","relation":"not_equals","condition":"Product Fee"},{"column":"vendor","relation":"not_equals","condition":"Order Protection"},{"column":"vendor","relation":"not_equals","condition":"Route"}],"published_scope":"global"},{"id":261439553619,"handle":"best-selling-collection","title":"Best selling products","updated_at":"2026-06-12T04:01:15-07:00","body_html":"\u003ch2\u003eBest selling products\u003c\/h2\u003e","published_at":"2021-08-20T17:56:07-07:00","sort_order":"best-selling","template_suffix":null,"disjunctive":false,"rules":[{"column":"variant_price","relation":"greater_than","condition":"0"},{"column":"vendor","relation":"not_equals","condition":"Route"}],"published_scope":"global"},{"id":616432140656,"handle":"developer-fc-esc","title":"Developer FC\u0026ESC","updated_at":"2026-06-11T04:01:32-07:00","body_html":"\u003ch2\u003eDeveloper FC\u0026amp;ESC\u003c\/h2\u003e","published_at":"2024-10-11T11:33:39-07:00","sort_order":"alpha-asc","template_suffix":"","disjunctive":false,"rules":[{"column":"tag","relation":"equals","condition":"Drone_FCESC Function-Development"}],"published_scope":"global","image":{"created_at":"2024-10-24T11:04:20-07:00","alt":"Developer-FC-ESC NewBeeDrone","width":1080,"height":1080,"src":"\/\/newbeedrone.com\/cdn\/shop\/collections\/Developer-FC-ESC-NewBeeDrone-51709472.jpg?v=1729793060"}},{"id":275819921491,"handle":"drone-fc-esc","title":"Drone FC+ESC","updated_at":"2026-06-12T04:01:14-07:00","body_html":"\u003ch2\u003eDrone FC+ESC\u003c\/h2\u003e","published_at":"2023-05-29T11:18:38-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"type","relation":"equals","condition":"Drone FC+ESC"}],"published_scope":"global"},{"id":617618997616,"handle":"everything-but-sales-gift-card-new-products-insurance-2","title":"Everything but Gift Card, New Products, Insurance,3DR,DJI","updated_at":"2026-06-12T14:37:32-07:00","body_html":"\u003cp\u003eEverything but Gift Card, New Products, Insurance\u003c\/p\u003e","published_at":"2024-11-22T15:59:13-08:00","sort_order":"best-selling","template_suffix":"","disjunctive":false,"rules":[{"column":"type","relation":"not_equals","condition":"Gift Cards \u0026 Codes"},{"column":"type","relation":"not_equals","condition":"Protection"},{"column":"vendor","relation":"not_equals","condition":"3DR"},{"column":"vendor","relation":"not_equals","condition":"DJI"},{"column":"vendor","relation":"not_equals","condition":"HDZero"},{"column":"vendor","relation":"not_equals","condition":"Route"}],"published_scope":"global"},{"id":278059647059,"handle":"everything-sans-dji","title":"Everything sans DJI","updated_at":"2026-06-12T14:37:32-07:00","body_html":"\u003ch2\u003eEverything sans DJI\u003c\/h2\u003e","published_at":"2023-11-23T15:18:37-08:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"DJI"}],"published_scope":"global"},{"id":162113912915,"handle":"everything-sans-dji-and-nbd","title":"Everything sans DJI, Insta 360, NBD","updated_at":"2026-06-12T04:01:15-07:00","body_html":"\u003ch2\u003eEverything sans DJI, Insta 360, NBD\u003c\/h2\u003e","published_at":"2020-09-27T00:23:54-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"NewBeeDrone"},{"column":"vendor","relation":"not_equals","condition":"DJI"},{"column":"vendor","relation":"not_equals","condition":"Insta360"},{"column":"type","relation":"not_equals","condition":"Insurance"}],"published_scope":"global"},{"id":162114011219,"handle":"everything-sans-newbeedrone","title":"Everything sans NewBeeDrone","updated_at":"2026-06-12T04:01:15-07:00","body_html":"\u003ch2\u003eEverything sans NewBeeDrone\u003c\/h2\u003e","published_at":"2020-09-27T00:23:54-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"NewBeeDrone"}],"published_scope":"global"},{"id":272590831699,"handle":"everything-sans-sales","title":"Everything sans Sales","updated_at":"2026-06-12T14:37:32-07:00","body_html":"\u003ch2\u003eEverything sans Sales\u003c\/h2\u003e","published_at":"2022-10-24T20:04:40-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"is_price_reduced","relation":"is_not_set","condition":""}],"published_scope":"global"},{"id":281197248595,"handle":"government-military","updated_at":"2026-06-11T04:01:32-07:00","published_at":"2024-03-28T16:51:34-07:00","sort_order":"created-desc","template_suffix":"","published_scope":"global","title":"Government\/Military\/Industrial","body_html":"\u003ch2\u003eGovernment\/Military\/Industrial\u003c\/h2\u003e"},{"id":260458414163,"handle":"holybro","title":"Holybro","updated_at":"2026-06-06T04:01:16-07:00","body_html":"\u003ch2\u003eHolybro\u003c\/h2\u003e","published_at":"2021-03-04T11:31:41-08:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"equals","condition":"HolyBro"}],"published_scope":"global","image":{"created_at":"2024-10-24T10:46:37-07:00","alt":"Holybro NewBeeDrone","width":600,"height":315,"src":"\/\/newbeedrone.com\/cdn\/shop\/collections\/Holybro-NewBeeDrone-51714814.jpg?v=1729791997"}},{"id":276074135635,"handle":"july-4th-2023-sale","title":"July 4th Sale","updated_at":"2026-06-12T04:01:15-07:00","body_html":"\u003ch2\u003eJuly 4th Sale\u003c\/h2\u003e","published_at":"2023-06-26T16:25:13-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":true,"rules":[{"column":"type","relation":"equals","condition":"FPV Drones BNF \u0026 RTF"},{"column":"vendor","relation":"equals","condition":"HolyBro"},{"column":"tag","relation":"equals","condition":"Holiday Sale"}],"published_scope":"global"},{"id":276726612051,"handle":"new-collection","title":"New products","updated_at":"2026-06-12T04:01:15-07:00","body_html":"\u003ch2\u003eNew products\u003c\/h2\u003e","published_at":"2023-08-17T22:23:22-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"variant_price","relation":"greater_than","condition":"0"},{"column":"title","relation":"not_contains","condition":"Order Protection"},{"column":"vendor","relation":"not_equals","condition":"Route"}],"published_scope":"web"},{"id":261439455315,"handle":"best-selling-products","title":"Newest Products","updated_at":"2026-06-12T14:37:32-07:00","body_html":"\u003ch2\u003eNewest Products\u003c\/h2\u003e","published_at":"2021-08-20T17:48:19-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":true,"rules":[{"column":"title","relation":"contains","condition":"Best Selling"},{"column":"title","relation":"not_contains","condition":"Best Selling"}],"published_scope":"global"}]
["20240530first","20240801","Drone_FCESC Amp-Does not apply","Drone_FCESC Firmware-ArduPilot","Drone_FCESC Firmware-PX4","Drone_FCESC Function-Development","Drone_FCESC Processor-Nvidia Jetson","Drone_FCESC Size-Other","Drone_FCESC Type-Flight Controller"]
Home
›
Drone FC+ESC
›
Holybro Pixhawk Jetson Baseboard
Holybro Pixhawk Jetson Baseboard
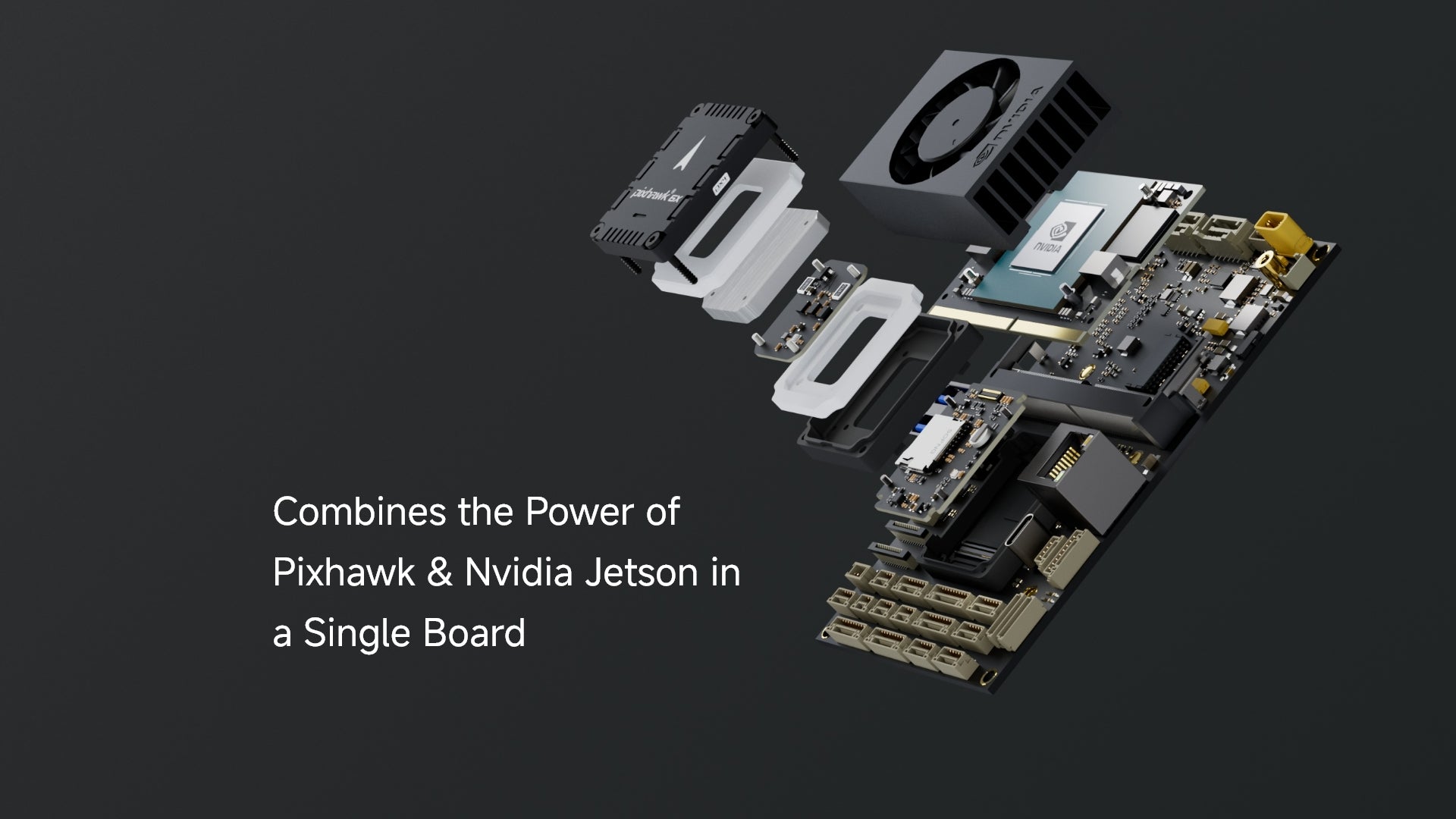
The Holybro Pixhawk Jetson Baseboard is a cutting-edge development platform designed to integrate the power of NVIDIA Jetson modules with the advanced flight control of the Pixhawk ecosystem. This baseboard supports seamless connection to Jetson modules, enabling AI-driven tasks such as object detection, autonomous navigation, and real-time data processing. Ideal for advanced robotics and UAV projects, the Pixhawk Jetson Baseboard allows developers to leverage both the power of Pixhawk flight controllers and Jetson’s AI capabilities, all in one versatile and efficient platform.
Key Features:
Pixhawk and Jetson Integration : Combines the best of flight control and AI processing.
Robust Connectivity : Provides multiple interfaces for easy communication with sensors and other hardware.
AI-Driven Capabilities : Supports NVIDIA Jetson modules for advanced AI applications like autonomous navigation.
Flexible Design : Suitable for a wide range of robotics and UAV applications.
Real-Time Processing : Enables real-time data analysis and decision-making for complex environments.
Perfect for developers, researchers, and UAV professionals, the Holybro Pixhawk Jetson Baseboard is the key to unlocking next-generation autonomous robotics and flight systems.
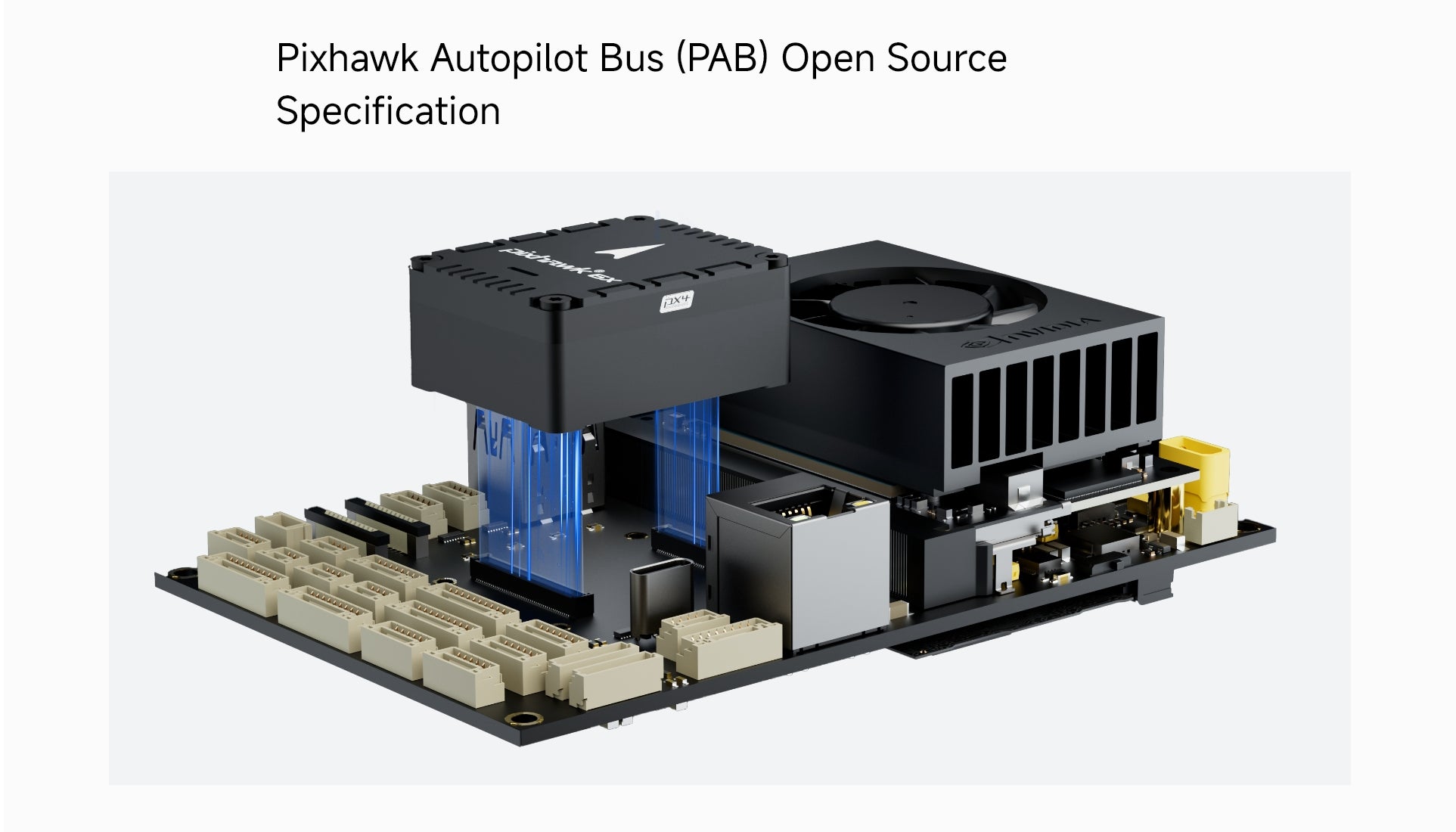
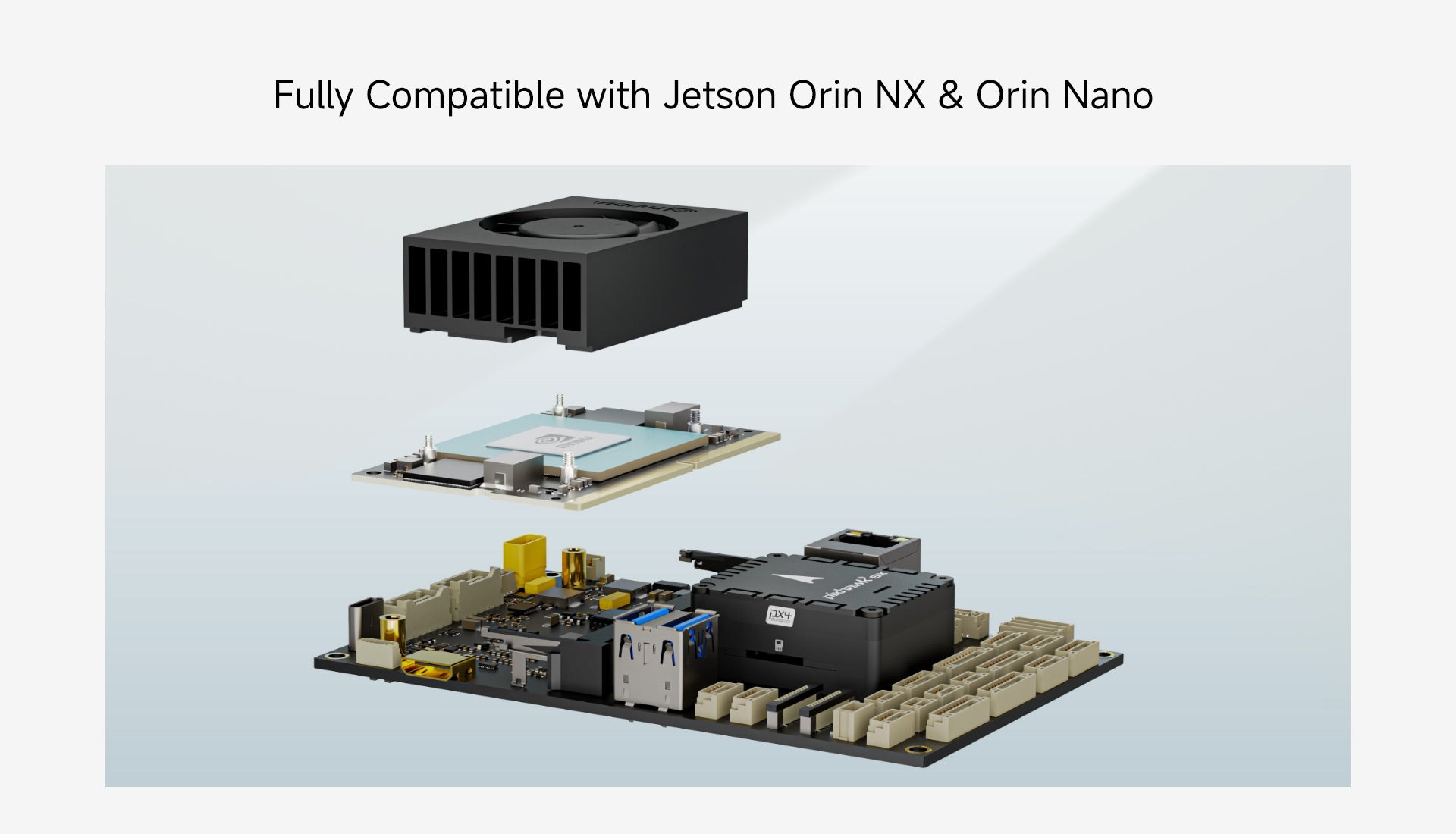
Description The Holybro Pixhawk Jetson Baseboard is based on the Pixhawk Autopilot Bus open source specification and the NVIDIA Jetson Orin NX/Nano Carrier Board. The Pixhawk Autopilot Bus (PAB) Form Factor enables this to be used with any PAB flight controller such as the Pixhawk 6X
Port & Connection Jetson Connectors
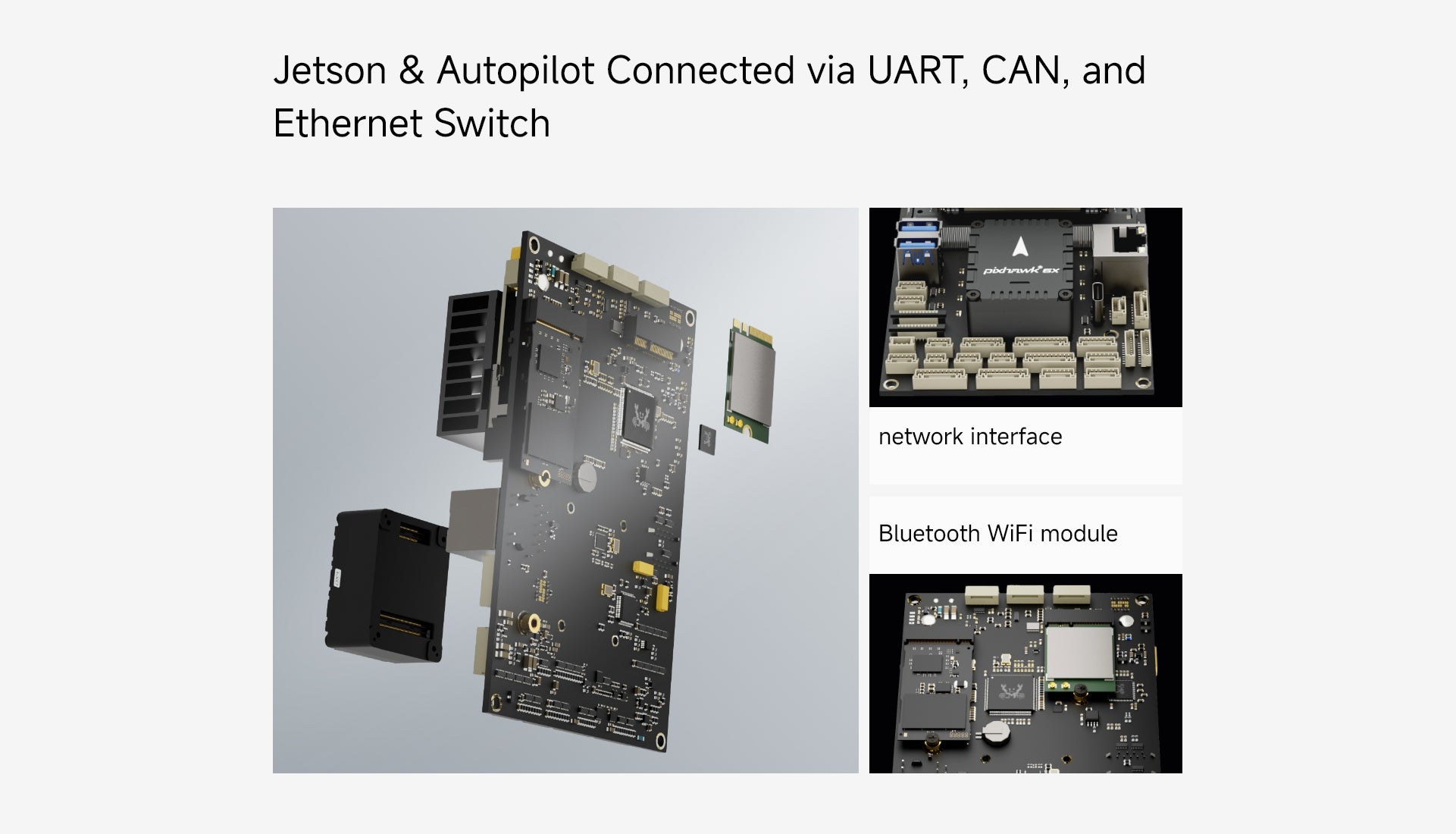
2x Gigabit Ethernet port
Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
8-pin JST-GH
RJ45
2x MIPI CSI Camera Inputs
4 Lanes each
15-Pin Raspberry Pi Cam FFC
2x USB 3.0 Host Port
2x USB 2.0 Host Port
5-Pin JST-GH
0A Current Limit
USB 2.0 for Programming/debugging
2 Key M 2242 for NVMe SSD
2 Key E 2230 for WiFi/BT
Mini HDMI Out
4x GPIO
CAN Port
Connected to Autopilot’s CAN2 (4 Pin JST-GH)
SPI Port
I2C Port
I2S Port
2x UART Port
1 for debug
1 connected to Autopilot’s telem2
Fan Power Port
IIM42652 IMU
Input Power
XT30 Connector
Voltage Rating: 7V-24V (3S-4S)
Separate input power circuits than the Autopilot to ensure flight safety
Holybro UBEC can be used for application above 4S
Note: The Pixhawk Jetson Baseboard has an integrated UBEC to convert 7V-24V to 5.5V for the Jetson. Using an external UBEC alongside the integrated one provides redundancy and easier replacement in case of BEC failure.
Power Requirements
8V/3A Minimum
Depends on Usage and Peripherals
Autopilot Connectors
Pixhawk Autopilot Bus Interface
100 Pin Hirose DF40
50 Pin Hirose DF40
Redundant Digital Power Module Inputs
I2C Power Monitor Support
2x – 6 Pin Molex CLIK-Mate
Power Path Selector w/ Overvoltage Protection
Voltage Ratings:
Max input voltage: 6V
USB Power Input: 4.75~5.25V
Full GPS Plus Safety Switch Port
Secondary (GPS2) Port
2x CAN Ports
3x Telemetry Ports with Flow Control
2x 6-Pin JST-GH
1 is connected to Jetson’s UART1 Port
16 PWM Outputs
UART4 & I2C Port
2x Gigabit Ethernet port
Connected to both Jetson & Autopilot via Ethernet switch (RTL8367S)
8-pin JST-GH
RJ45
AD & IO
USB 2.0
DSM Input
RC in
SPI Port
External Sensor Bus (SPI5
11-Pin JST-GH
2x Debug Port
1 for FMU
1 for IO
10-Pin JST-SH
Dimensions (Without Jetson and Flight Controller Module)
Weight
With Jetson, Heatsink, Flight Controller, M.2 SSD, M.2 Wi-Fi Module 203.2g
Input voltage: 3~14S (XT30)
Output voltage: 6.0V/7.2V/8.0V/9.2V (recommend 7.2V if supplying power to Jetson Board)
Output Current
Continuous: 12A
Burst: 24A
Size: 48x33.6x16.3 mm
Weight: 47.8g
Reference Links
Package Includes SKU20281:
Pixhawk 6X Flight Controller Module
Pixhawk Jetson Orin Baseboard
Nvidia Orin NX (16GB)
Includes the following:
SSD: Samsung PM9B1 PCIe 4.0 NVMe 512GB
Wi-Fi & Bluetooth Module: Intel 8265NGW AC Dual Band
Camera: IMX219-200
PM02D Power Module
UBEC Power Module
PDB Board
Cable Set