CUAV NEO 3 Pro GPS Module | GNSS U-BLOX M9N CAN BUS (35 cm)
The CUAV NEO 3 Pro GPS Module is a state-of-the-art GNSS solution designed for high-performance drone applications. Utilizing the advanced U-BLOX M9N chipset, this module delivers exceptional positioning accuracy and reliability, making it ideal for aerial photography, surveying, and other demanding UAV operations. With support for multiple GNSS systems, including GPS, GLONASS, Galileo, and BeiDou, the NEO 3 Pro ensures that your drone maintains a strong satellite connection, even in challenging environments.
Featuring a compact design with a cable length of 35 cm, this module is easy to integrate into various drone frames without adding unnecessary weight. The CUAV NEO 3 Pro is equipped with advanced features like a high-precision inertial navigation system, which enhances stability and positional accuracy during flight. Its CAN bus compatibility allows for seamless communication with your drone's flight controller, providing real-time data for optimal performance.
Whether you're a hobbyist or a professional pilot, the CUAV NEO 3 Pro GPS Module is an essential tool for enhancing the capabilities of your UAV. Its robust performance and easy integration make it a go-to choice for anyone looking to elevate their drone's navigation and positioning capabilities.
NEO continues the hardware design of NEO V2, upgrade the GNSS module to Ublox NEO M9N, supports Beidou, Galileo, Glonas and GPS receive at the same time, and the horizontal positioning accuracy is up to 0.7M. Integrated with safety switch, buzzer, RGB light.
Features
Buzzer prompt
safety switch
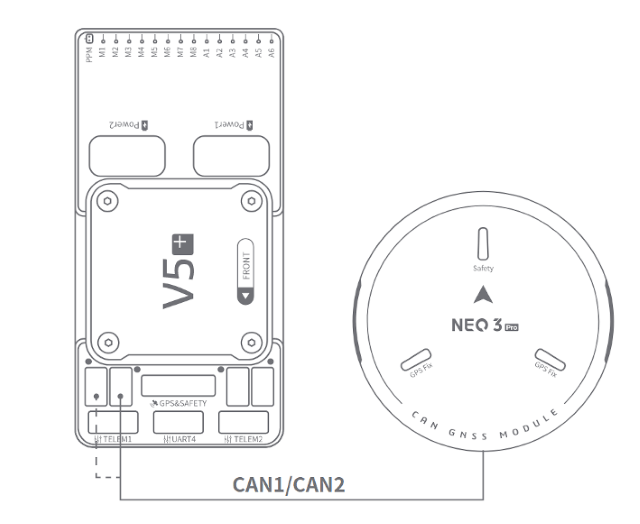
CAN Bus
MS5611 Barometer
RGB Status Light
RM3100 Industrial Compass
Ublox M9N Satellite receiver
New generation satellite receiver Ublox M9N,The actual measurement can reach a maximum accuracy of 0.7m.
Simultaneous reception by the four satellite systems
Supports simultaneous reception of Beidou, Galileo, Glonas, and GPS four satellite systems
High-performance processing unit STM32F412
RM3100 industrial sensor
Using RM3100 industrial grade sensor, has better anti-interference performance
002CIROCOMM
CROCOMM custom antenna
Special four-star high gain antenna
Built-in high-precision barometer
Built-in MS5611 high-precision barometer to meet the needs of different application scenarios
Triple filter design
NEO 3 Pro adopts SAW+LNA+SAW triple filter design, effectively avoiding the influence of remote control, data transmission, 4G signal on GPS positioning reception
Open source program, support custom program
NEO 3 Pro Specifications
Processor
STM32F412
Compass
RM3100
Barometer
MS5611
GNSS receiver
UBLOX NEO M9N
RGB drive
NCP5623C
Buzzer
Passive buzzer
Safety switch
Physical button
GNSS
Beidou、Galileo、 GLONASS、 GPS
GNSS Augmentation System
SBAS:WAAS,EGNOS,MSAS QZSS:L1s(SAIF) other:RTCM3.3
Number of concurrent GNSS
4
Frequency band
GPS:L1C/A GLONASS:L10F Beidou:B1I Galileo:E1B/C
Horizontal accuracy
2.0M
Speed accuracy
0.05M/S
Nav. update rate
25Hz(Max)
Acquisition
Cold start:24S Hot start:2S Aided start:2s
Number of satellites(MAX)
32+
Sensitivity
Tracking and nav-167dBm Cold start Hot star-148dBm Reacquisition -160dBm
Protocol
UAVCAN
Port TYpe
GHR-04V-S
Supported flight controller
CUAV series, Pixahwk series
Wave filtering
SAW+LNA+SAW
Anti-Electromagnetic/radio frequency interference
EMI+RFI
Upgrade firmware
support
Support Flight control type
Ardupilot/PX4*(PX4 is still working hard to adapt to the clock)
Input voltage
5V
Operating temperature
-10~70℃
Size
60*60*16MM
Weight
33g
NEO 3 Pro level accuracy when the SBAS enhancement system is turned on, the nominal accuracy is 1.5m (default); when the SBAS enhancement system is turned off, it is 2.0m
NEO 3 Pro supports RTCM3.3 injection, but does not support RTCM output; it can achieve pseudorange differential (meter-level positioning) but does not support carrier phase differential (RTK), and it needs a base station that supports RTCM3.3 output.
Ardupilot 4.0.0 and above firmware supports NEO 3 PRO, and PX4 firmware is still in the adaptation stage.



 0
0