[{"id":261439520851,"handle":"all-new-arrivals","title":"All New Arrivals","updated_at":"2026-07-15T10:16:10-07:00","body_html":"\u003ch2\u003eAll New Arrivals\u003c\/h2\u003e","published_at":"2021-08-20T17:56:07-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"title","relation":"not_contains","condition":"placeholder"},{"column":"title","relation":"not_contains","condition":"Order Protection"},{"column":"vendor","relation":"not_equals","condition":"Route"}],"published_scope":"global"},{"id":162113290323,"handle":"all","title":"All Products","updated_at":"2026-07-15T10:16:10-07:00","body_html":"\u003ch2\u003eAll Products\u003c\/h2\u003e","published_at":"2020-09-27T00:23:29-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"type","relation":"not_equals","condition":"Product Fee"},{"column":"vendor","relation":"not_equals","condition":"Order Protection"},{"column":"vendor","relation":"not_equals","condition":"Route"}],"published_scope":"global"},{"id":261439553619,"handle":"best-selling-collection","title":"Best selling products","updated_at":"2026-07-15T10:16:10-07:00","body_html":"\u003ch2\u003eBest selling products\u003c\/h2\u003e","published_at":"2021-08-20T17:56:07-07:00","sort_order":"best-selling","template_suffix":null,"disjunctive":false,"rules":[{"column":"variant_price","relation":"greater_than","condition":"0"},{"column":"vendor","relation":"not_equals","condition":"Route"}],"published_scope":"global"},{"id":276924235859,"handle":"drone-pmu-pdb","title":"Drone Power Management Components","updated_at":"2026-07-08T13:19:54-07:00","body_html":"\u003ch2\u003eDrone Power Management Components\u003c\/h2\u003e","published_at":"2023-10-03T15:29:56-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"type","relation":"equals","condition":"Drone Power Management"}],"published_scope":"global"},{"id":617618997616,"handle":"everything-but-sales-gift-card-new-products-insurance-2","title":"Everything but Gift Card, New Products, Insurance,3DR,DJI","updated_at":"2026-07-15T10:16:10-07:00","body_html":"\u003cp\u003eEverything but Gift Card, New Products, Insurance\u003c\/p\u003e","published_at":"2024-11-22T15:59:13-08:00","sort_order":"best-selling","template_suffix":"","disjunctive":false,"rules":[{"column":"type","relation":"not_equals","condition":"Gift Cards \u0026 Codes"},{"column":"type","relation":"not_equals","condition":"Protection"},{"column":"vendor","relation":"not_equals","condition":"3DR"},{"column":"vendor","relation":"not_equals","condition":"DJI"},{"column":"vendor","relation":"not_equals","condition":"HDZero"},{"column":"vendor","relation":"not_equals","condition":"Route"},{"column":"vendor","relation":"not_equals","condition":"Antigravity"}],"published_scope":"global"},{"id":261183897683,"handle":"everything-sans-dji-insta360","title":"Everything but Sales, Bundles, DJI, Insta360, HDZero, Holybro, Gift Card, Insurance","updated_at":"2026-07-15T10:16:10-07:00","body_html":"\u003ch2\u003eEverything but Sales, Bundles, DJI, Insta360, HDZero, Gift Card,Insurance\u003c\/h2\u003e","published_at":"2021-07-01T16:52:12-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"DJI"},{"column":"vendor","relation":"not_equals","condition":"Insta360"},{"column":"type","relation":"not_equals","condition":"Gift Cards"},{"column":"type","relation":"not_equals","condition":"Bundle"},{"column":"is_price_reduced","relation":"is_not_set","condition":""},{"column":"vendor","relation":"not_equals","condition":"HDZero"},{"column":"type","relation":"not_equals","condition":"Protection"},{"column":"vendor","relation":"not_equals","condition":"3DR"},{"column":"vendor","relation":"not_equals","condition":"HolyBro"},{"column":"vendor","relation":"not_equals","condition":"Route"}],"published_scope":"global"},{"id":278059647059,"handle":"everything-sans-dji","title":"Everything sans DJI","updated_at":"2026-07-15T10:16:10-07:00","body_html":"\u003ch2\u003eEverything sans DJI\u003c\/h2\u003e","published_at":"2023-11-23T15:18:37-08:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"DJI"}],"published_scope":"global"},{"id":162113912915,"handle":"everything-sans-dji-and-nbd","title":"Everything sans DJI, Insta 360, NBD","updated_at":"2026-07-15T10:16:10-07:00","body_html":"\u003ch2\u003eEverything sans DJI, Insta 360, NBD\u003c\/h2\u003e","published_at":"2020-09-27T00:23:54-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"NewBeeDrone"},{"column":"vendor","relation":"not_equals","condition":"DJI"},{"column":"vendor","relation":"not_equals","condition":"Insta360"},{"column":"type","relation":"not_equals","condition":"Insurance"}],"published_scope":"global"},{"id":162114011219,"handle":"everything-sans-newbeedrone","title":"Everything sans NewBeeDrone","updated_at":"2026-07-15T10:16:10-07:00","body_html":"\u003ch2\u003eEverything sans NewBeeDrone\u003c\/h2\u003e","published_at":"2020-09-27T00:23:54-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"vendor","relation":"not_equals","condition":"NewBeeDrone"}],"published_scope":"global"},{"id":272590831699,"handle":"everything-sans-sales","title":"Everything sans Sales","updated_at":"2026-07-15T10:16:10-07:00","body_html":"\u003ch2\u003eEverything sans Sales\u003c\/h2\u003e","published_at":"2022-10-24T20:04:40-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"is_price_reduced","relation":"is_not_set","condition":""}],"published_scope":"global"},{"id":662793978224,"handle":"excluded-items-2026-july-4","title":"Excluded items 2026 July 4","updated_at":"2026-07-15T10:16:10-07:00","body_html":"","published_at":"2026-07-03T23:03:39-07:00","sort_order":"most-relevant","template_suffix":"","disjunctive":true,"rules":[{"column":"type","relation":"not_equals","condition":"Gift Cards \u0026 Codes"},{"column":"type","relation":"not_equals","condition":"Protection"},{"column":"vendor","relation":"not_equals","condition":"3DR"},{"column":"title","relation":"not_equals","condition":"DJI"},{"column":"vendor","relation":"not_equals","condition":"Route"},{"column":"vendor","relation":"not_equals","condition":"HolyBro"},{"column":"vendor","relation":"not_equals","condition":"RadioMaster"},{"column":"vendor","relation":"not_equals","condition":"AntiGravity"}],"published_scope":"global"},{"id":281197248595,"handle":"government-military","updated_at":"2026-07-10T04:01:41-07:00","published_at":"2024-03-28T16:51:34-07:00","sort_order":"created-desc","template_suffix":"","published_scope":"global","title":"Government\/Military\/Industrial","body_html":"\u003ch2\u003eGovernment\/Military\/Industrial\u003c\/h2\u003e"},{"id":276726612051,"handle":"new-collection","title":"New products","updated_at":"2026-07-15T10:16:10-07:00","body_html":"\u003ch2\u003eNew products\u003c\/h2\u003e","published_at":"2023-08-17T22:23:22-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":false,"rules":[{"column":"variant_price","relation":"greater_than","condition":"0"},{"column":"title","relation":"not_contains","condition":"Order Protection"},{"column":"vendor","relation":"not_equals","condition":"Route"}],"published_scope":"web"},{"id":261439455315,"handle":"best-selling-products","title":"Newest Products","updated_at":"2026-07-15T10:16:10-07:00","body_html":"\u003ch2\u003eNewest Products\u003c\/h2\u003e","published_at":"2021-08-20T17:48:19-07:00","sort_order":"created-desc","template_suffix":"","disjunctive":true,"rules":[{"column":"title","relation":"contains","condition":"Best Selling"},{"column":"title","relation":"not_contains","condition":"Best Selling"}],"published_scope":"global"}]
["20230920 First","Drone_Power Max Current Input-110A","Drone_Power Max Voltage Input-60V","Drone_Power Part-Power Distribution Board","Drone_Power Stable Current Output-3.5A","Drone_Power Stable Current Output-6A","Drone_Power Voltage Output-12V","Drone_Power Voltage Output-5V"]
The CUAV CAN PDB Multifunctional Autopilot Baseboard is an innovative and versatile solution for drone builders and developers looking to enhance their autopilot systems. This advanced Power Distribution Board (PDB) not only distributes power efficiently to various components but also integrates seamlessly with the CAN bus architecture, ensuring reliable communication between the autopilot and connected devices.
Designed for maximum flexibility, the CUAV CAN PDB supports a range of configurations and can be used with multiple flight controllers, making it ideal for both hobbyists and professionals in the UAV industry. It features high-current capacity, enabling it to handle the power demands of various drone setups while maintaining stable operation. The baseboard is equipped with multiple input and output ports, allowing for easy connection of sensors, ESCs, and other peripherals.
Moreover, the CUAV CAN PDB comes with built-in protection features, including over-current and voltage protection, ensuring the safety of your drone components. Its compact design and lightweight construction make it easy to integrate into any drone frame without adding unnecessary weight. Whether you’re developing a custom drone project or enhancing an existing one, the CUAV CAN PDB Multifunctional Autopilot Baseboard is an essential component for achieving optimal performance and reliability in your aerial applications.
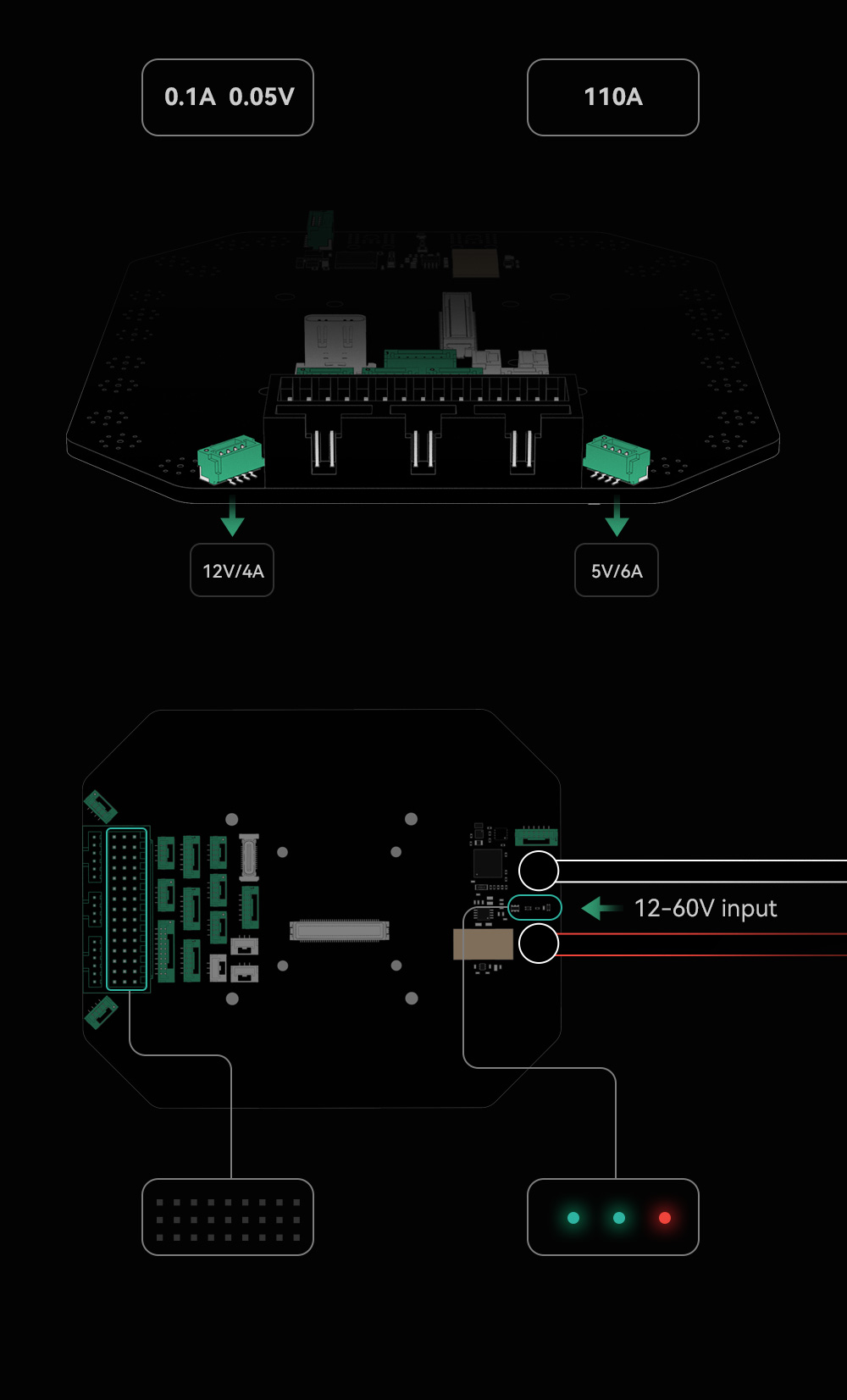
CAN PDB is a multi-functional baseboard of CORE flight controller, which provides abundant interfaces, integrates the functions of power module and power distribution board, and supports voltage input of 14~60V, and provide continuous working current up to 110A. It adopts self-developed ITT algorithm and has high accuracy power detection of 0.1A and 0.05V,. It has 10 power output welding points, and provides a 5V/6A and a 12V/4A stabilized output to provide power for external device. Supports the CORE modules of V5 +,X7 +, and X7+ Pro flight controller.
Adding PPM interface enriches the support of remote control receiver protocol;
The power output is upgraded from screw fixing to welding process, which reduces the risk of loose screws caused by heating and vibration caused by poor contact.
Power Accuracy
Sustained Current
UBEC Stable Output
14 PWM Out
State display
Specification
硬件参数
Proccessor
STM32F412 100Mhz 512K Flash 256K RAM
Input voltage
10-60(3-15S Lipo)
Current measurement range
0-110A
Maximum current range
0-180A
5V output
max 6A,stagle 6A
12V output
max 4A,stable 3.5A
Servo
14
Receiver Protocol
SBUS/PWM/DSM
CORE support
V5+ X7 X7+ X7 Pro CORE
Support Model
Copter/Plane/Helicopter/VTOL/unmanned vehicle/Rover, etc.
Firmware
ArduPilot 4.0.0 or above Px4 1.11.0 or above
Screw hole
CORE for M2.5, other for M3
Work Temperature
20~+100°C
Main IO
USB
1 (type-c)
UART
5(Include gps/uart4/telem1/telem2/debug)
CAN bus
2
I2C bus
3
SBUS/DSM IN
1(dupont connector)
PPM_IN
1
PWM OUT
14(Dupont connector)
ADC3.3
1
ADC6.6
1
SBUS OUT
1(useless when install X7/X7 pro/X7+ core)
RSSI
3.3V anolog voltage
DSU7
1
Size&Weight
Size&Wegiht
12cm(L)×10cm(W)×1.2cm(H)
Weight
163g(include cable)
Cable Length
30cm(not include connector)
CUAV CAN PDB Features:
1–Support 14~60V voltage input, 110A current.
2–0.1A, 0.05V power measurement accuracy
3–14 PWM outputs
4–5V/6A and a 12V/4A stabilized output
5–Thickened tinned PCB to reduce internal resistance
6–Power indicator LED, visually display battery voltage status
Set
CAN PDB Only, CAN PDB With V5+ Core, CAN PDB With X7+ Core