The CUAV Drone Pixhawk V5+ Flight Controller is a high-performance autopilot system designed for advanced UAV applications, offering precise control and stability in a variety of flight environments. Built on the open-source PX4 and APM platforms, the V5+ provides flexibility and compatibility for a wide range of drones, from hobbyist builds to professional UAV systems. Equipped with robust processing power and reliable sensor technology, this flight controller is suitable for tasks such as mapping, surveying, agricultural monitoring, and industrial inspections.
With multiple connectivity options—including CAN, PWM, UART, and I2C interfaces—the Pixhawk V5+ seamlessly integrates with an array of sensors, GPS modules, and telemetry devices, enhancing your drone’s capabilities for complex missions. Its redundant power and backup systems ensure reliable operation, making it suitable for critical applications where safety is paramount.
The Pixhawk V5+ Flight Controller also supports advanced navigation features, such as GPS waypoint missions and autonomous flight paths, allowing users to program precise flight routes. With easy integration, real-time telemetry support, and customizable settings, the CUAV Pixhawk V5+ is a powerful tool for pilots and developers looking to push their UAVs to new heights of functionality and reliability.
V5+ Autopilot
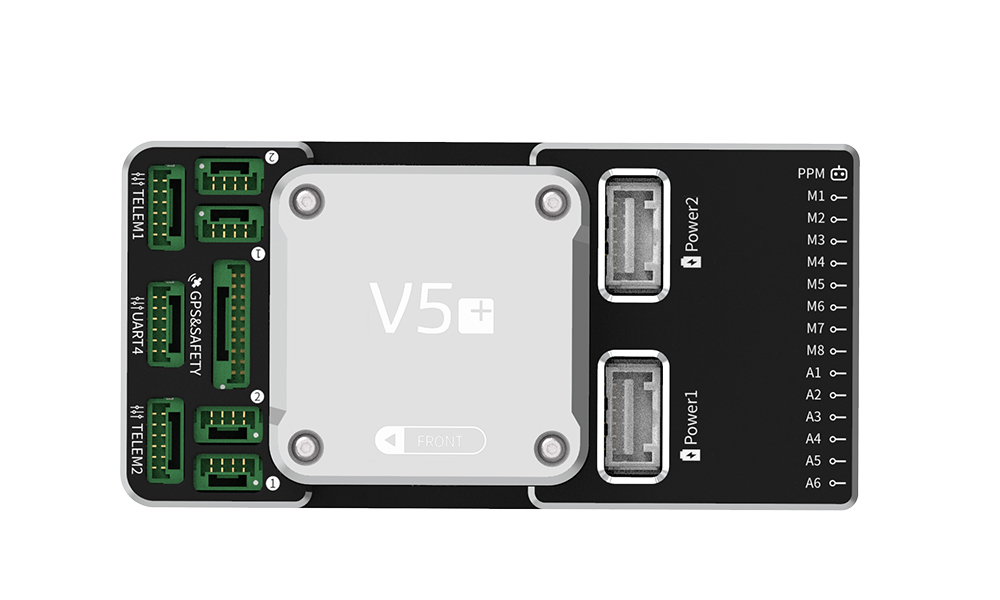
Interface standardization, rich I/O interface
Product description /V5+ flight controller
V5+ flight controller
V5+® is an advanced autopilot designed by CUAV® and the PX4 team and manufactured by CUAV. It is based on the Pixhawk FMUv5 design standard and is perfectly compatible with PX4 and ArduPilot firmware.
Previous
Next
Faster F765 processor
V5+ selects the STM32F765 processor with better performance. Its main frequency is up to 216MHZ and it contains 2MB FLASH/512K RAM. The clock speed is higher, the RAM is larger, and the speed will be greatly improved.
New FMUv5 hardware design
V5+ is a high-performance flight control system created by CUAV based on FMUv5 open source hardware. It has a more advanced processor than FMUv3, a larger FLASH and RAM, and a more stable and reliable sensor.
Support RTK centimeter positioning
V5+ supports RTK positioning module to achieve accurate centimeter positioning to meet your higher positioning requirements. (RTK positioning module needs to be purchased separately)
PX4 official standard
CUAV is a premium member of Dronecode and has been working to promote the PX4 open source project. The V5+ interface is designed according to the official PX4 standard to ensure compatibility and interoperability with hardware and software products in the PX4 ecosystem.
Multi-sensor redundancy combination
Built-in 5 sets of sensors, the flight controller monitors the multi-channel sensor data in real time, and performs redundant switching immediately after the failure, improving flight safety and stability.
Specifications /V5+ flight controller
Hardware parameter
Main processor
STM32F765 (32 Bit Arm® Cortex®-M7, 216MHz, 2MB flash, 512KB RAM)
Coprocessor
STM32F100 (32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM)
sensor
Accelerometer
ICM-20602/ICM-20689/BMI055
Gyro
ICM-20602/ICM-20689/BMI055
Electronic compass
IST8310
Barometer
MS5611
External interface
UART serial port
5
I2C
4
SPI
1
CAN
2
ADC
2
PWM output
8-14 PWM outputs (6 from IO, 8 from FMU)
DSM/SBUS/RSSI
1
PPM IN
1
CAN buses
2
Analog inputs for voltage/current
2
GPS&Safety
1
Debug/F7 SWD interface
1
USB interface
1(Type-C)
TF slot
1
Related interface protocol
PPM IN
PPM
DSM/SBUS
DSM/SBUS;RSSI:PWM/3.3v analog voltage
GPS
NMEA/UBLOX
Support model
PX4 and Ardupilot firmware
Copter/Plane/Helicopter/VTOL/unmanned vehicle/Rover, etc.