The CUAV X7+ Flight Controller is a premium autopilot system developed for high-end UAV applications, delivering outstanding stability, precision, and performance. Leveraging the latest PX4 open-source platform, the X7+ offers compatibility with a broad range of drones and unmanned systems, making it ideal for both industrial and professional use. With a powerful processing core and advanced sensor suite, the X7+ Flight Controller ensures smooth flight control, making it perfect for complex operations like aerial mapping, survey missions, and inspection tasks.
The X7+ is designed with extensive I/O capabilities, featuring CAN, PWM, UART, and I2C ports for seamless integration with additional sensors, GPS, and telemetry modules. Built with high redundancy and reliability, the X7+ includes robust failsafe mechanisms to ensure safe operation in challenging conditions, providing users with confidence even in critical missions.
The flight controller supports advanced autonomous features, such as GPS waypoint navigation, geofencing, and customizable flight paths, allowing users to tailor UAV performance to specific operational needs. With real-time telemetry support and fully customizable software, the CUAV X7+ Flight Controller is an essential tool for UAV professionals seeking precise and reliable control.
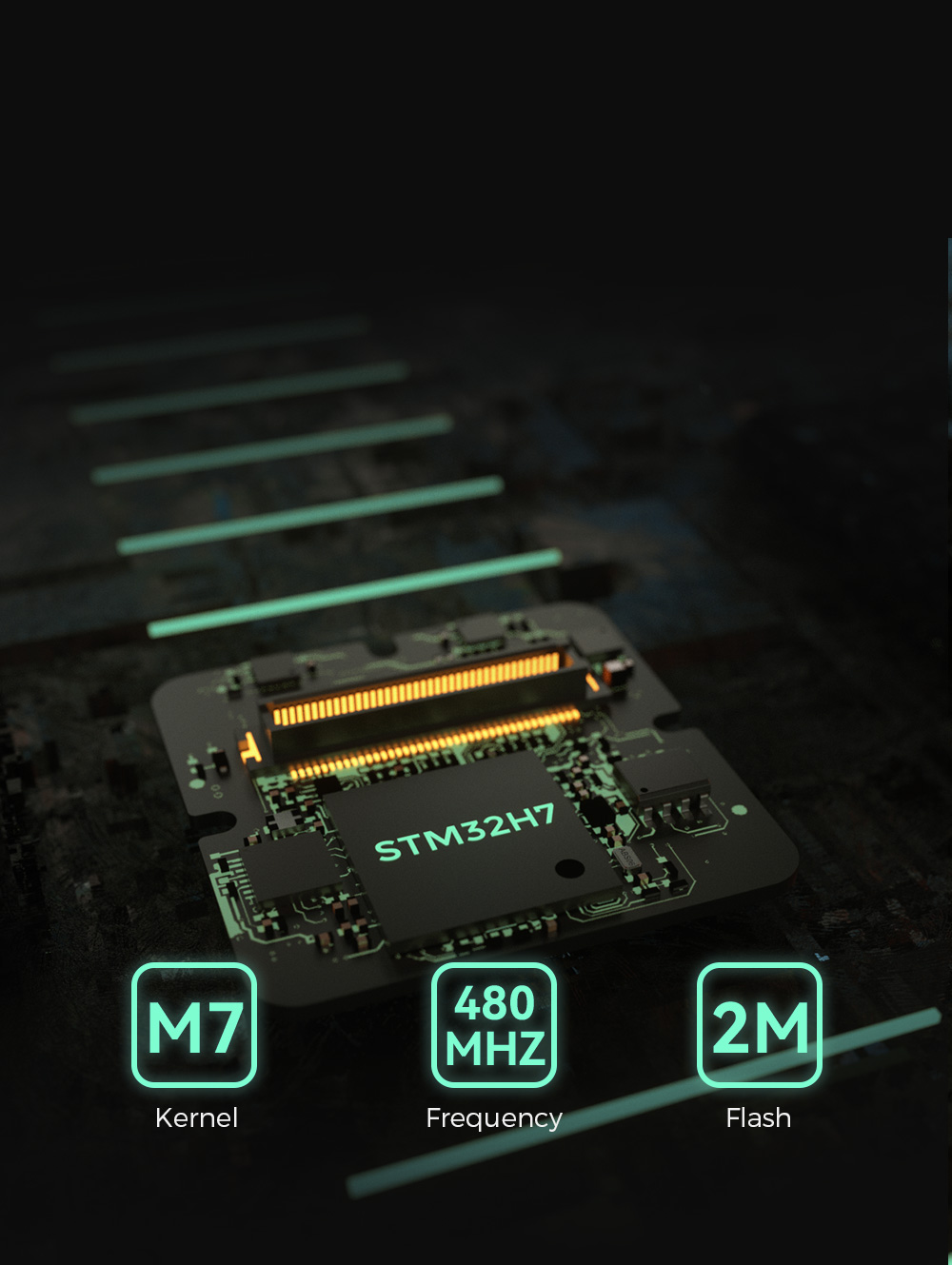
STM32H743 Processor
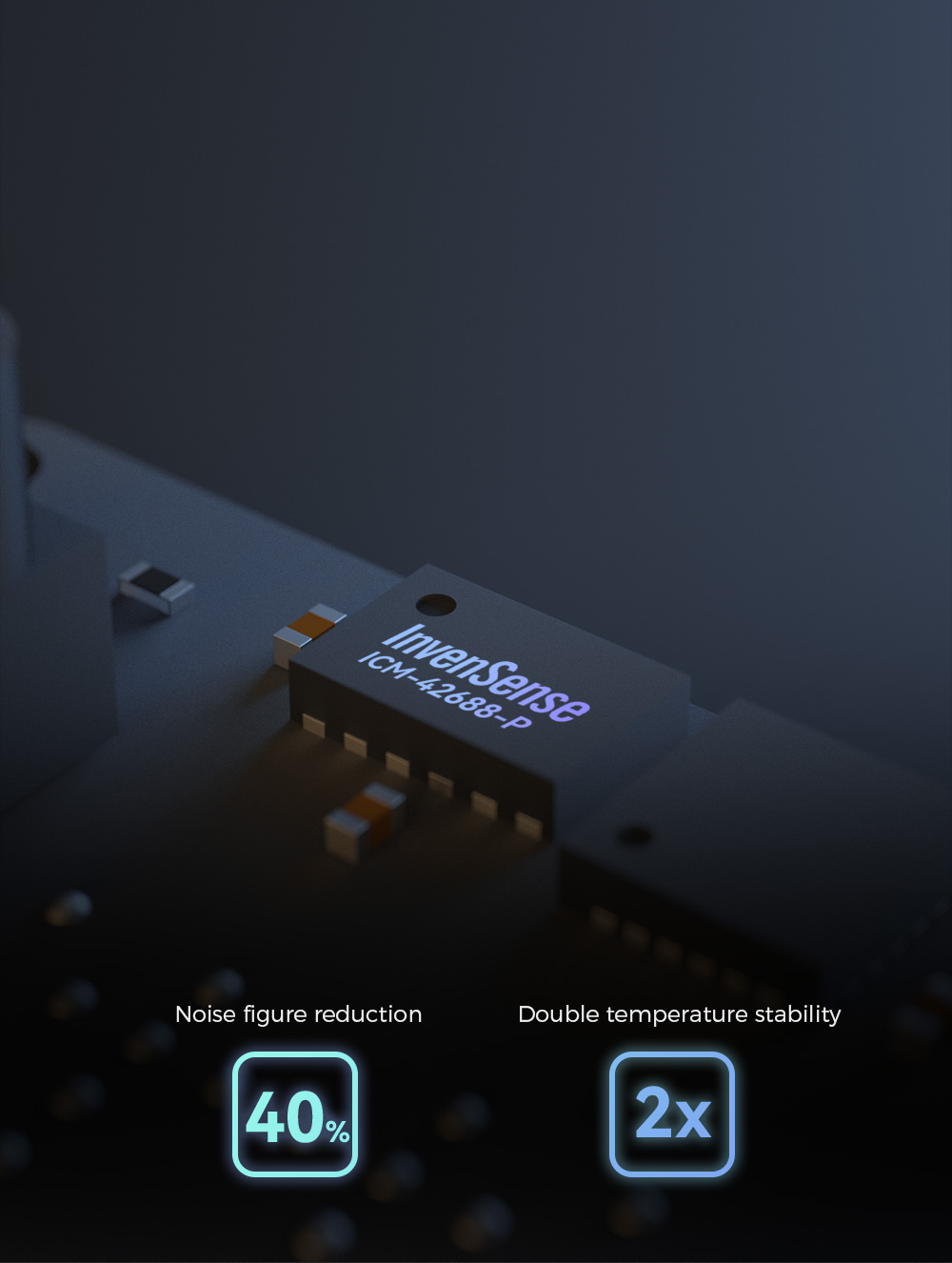
ICM-42688-P Acce&Gyro
RM3100 Industrial compass
H7 Processo Powerful Performance
X7+ autopilot uses STM32H743 series processors CPU, Cortex-M7 core (with double precision Floating-Point Unit). It makes operating frequency increase to 480Mhz, 2MB Flash,1MB RAM,Meet the higher computing needs of flight controllers Compared with the STM32F7 product line, the dynamic power consumption efficiency is doubled.
The Sensor is Upgraded Again
The sensor is one of the important indicators to evaluate the flight controller. This time, we have added the ICM-42688-P sensor. Compared with the traditional consumer IMU, the noise figure of ICM-42688-P is reduced by 40%, and the temperature stability is improved 2 times, so as to ensure the highest accuracy measurement in the case of temperature changes.
Sensor Redundancy Design
Built-in three sets of accelerometers and gyroscopes, the flight controller monitors the data of multiple sensors in real time, and executes redundant switching immediately in case of failure to improve flight safety and stability.
Temperature Compensation System
The built-in high-precision sensor temperature compensation system makes the sensor work at a constant temperature, ensuring that the sensor can operate stably with high precision and sensitivity in high and low temperature environments.
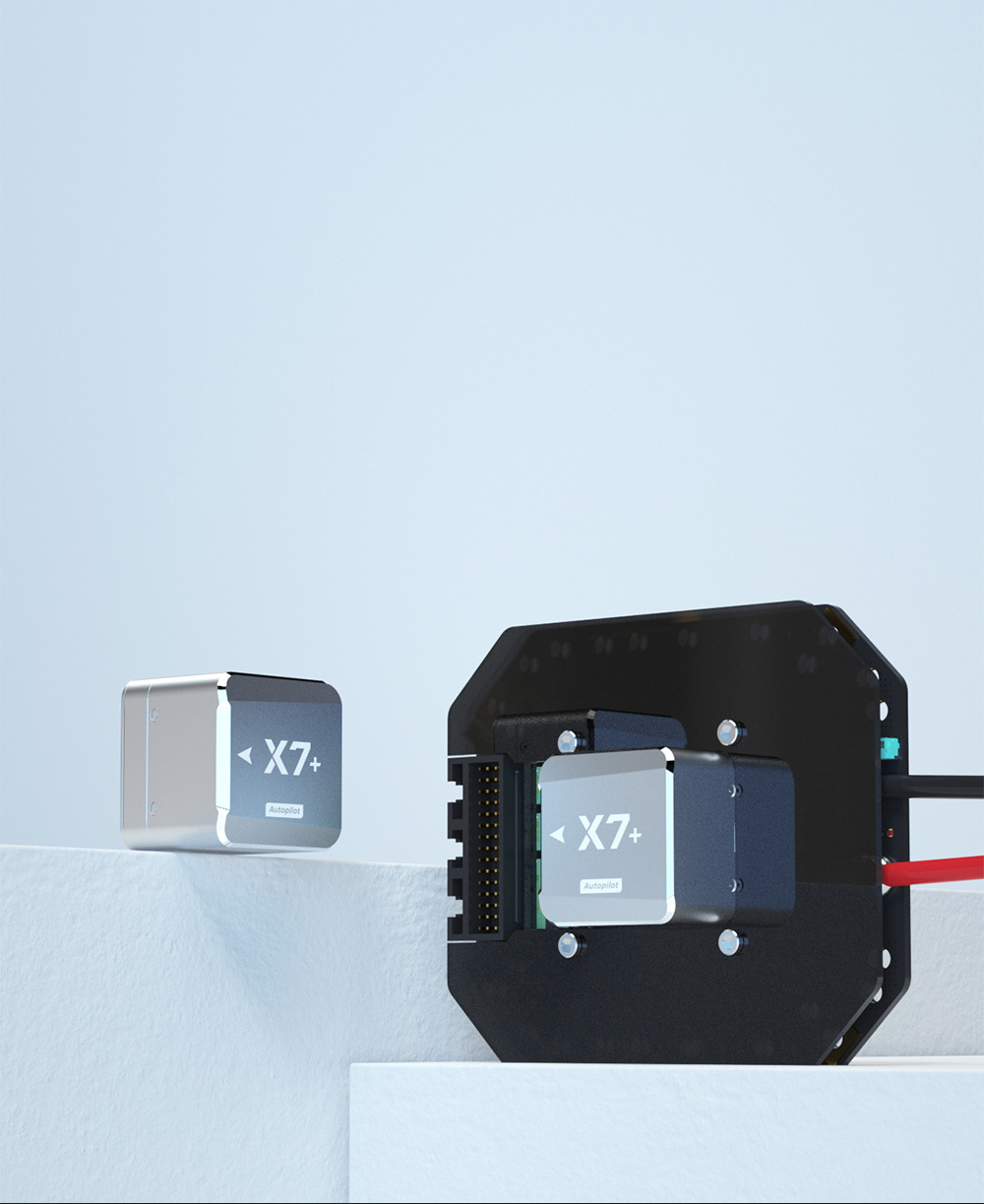
CORE Separate Design
The X7+ flight controller integrates the main MCU and IMU into the CORE module and can be sold separately. Users can design the baseboard according to the UAV structure to meet the individual needs of users, or purchase our CAN PDB baseboard for use. The X7+ CORE interface is compatible with X7, X7 Pro, and V5+ flight controller CORE.
Better CUAV Patented Shock Absorption System
After dozens of iterations, hundreds of shock-absorbing materials have been tested and verified, computer model analysis and thousands of flight tests, so improve the shock absorption to a further level
Standard Pack Digital Power Module
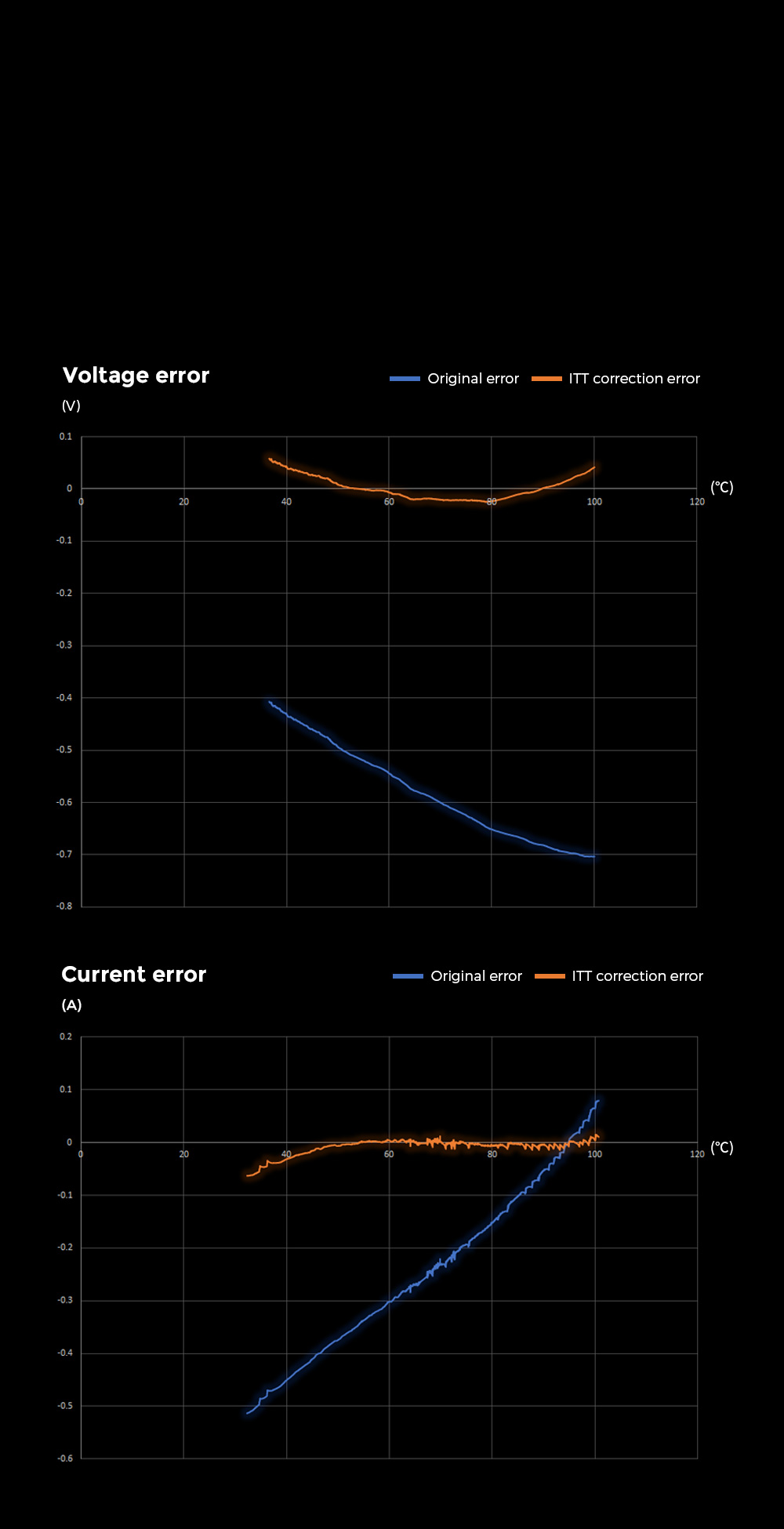
Standard package include UAVCAN protocol digital power detection module, using CUAV independent R&D ITT algorithm, accurate measurement of UAV real-time voltage and current, making flight time estimation more reliable.
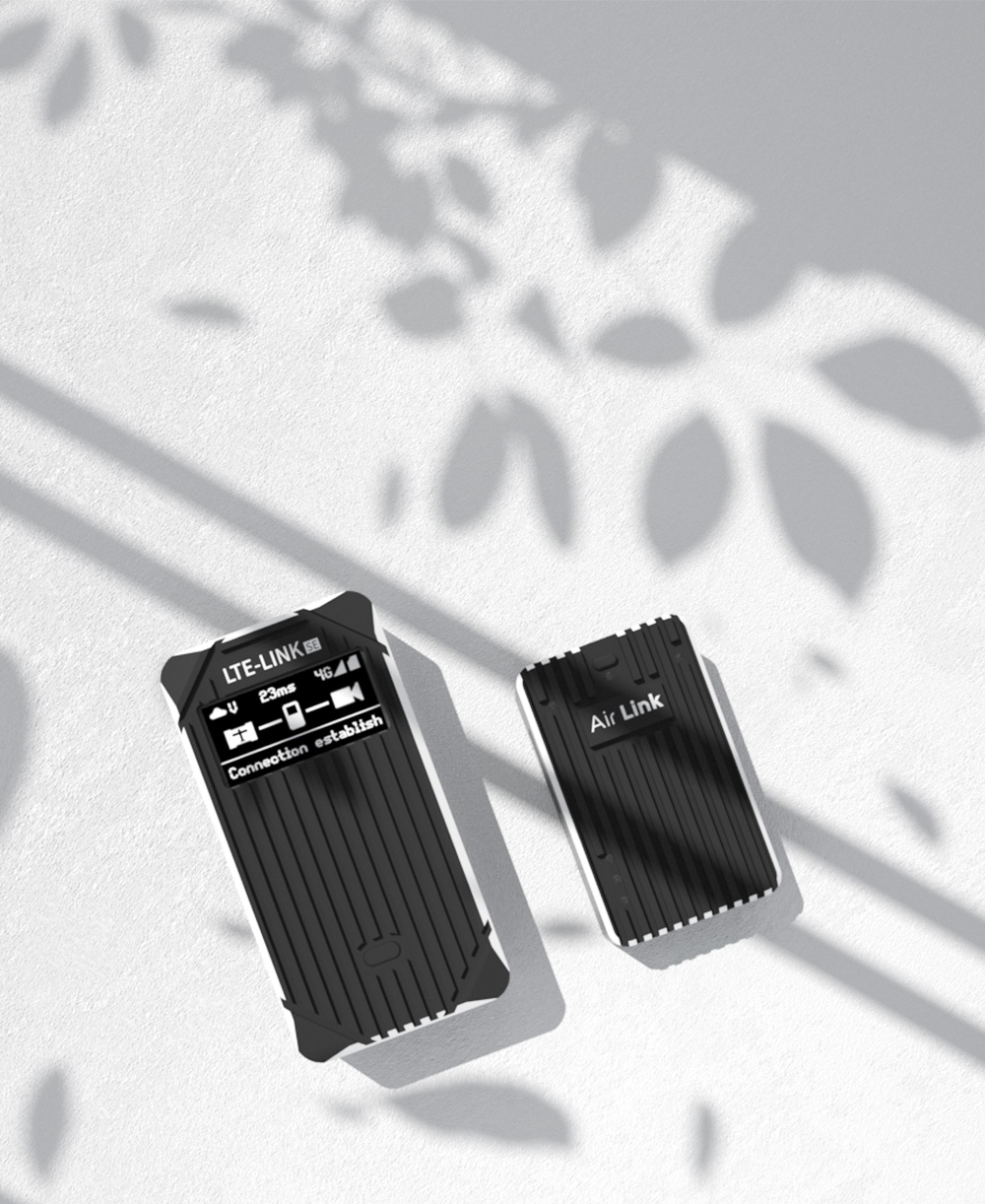
Support LTE Link Series 4G Telemetry
CUAV’s C-RTK series products can be purchased to achieve centimeter-level positioning, which can be used in scenes that require high-precision positioning. Such as plant, Agriculture, surveying and mapping, etc.
Optional RTK to Realize Centimeter-Level Positioning
Support LTE Link series 4G telemetry,so that your flight video and data can be transmitted without distance limitation, and support video sharing.
Firmware anad Model Support
PX4
Ardupilot
Note:X7+ flight controller is compatible with ArduPilot 4.10/ PX4 1.12.3 or higher firmware.
Copter/Plane,
othermodels are
adapting
Support all models:
Copter/Plane/
Helicopter/VTOL/
unmannedvehicle/
Rover, etc.
Specifications
Main FMU Processor: STM32H743
On-board sensors:
Accelerometer/Gyroscope: ICM-42688-P(X7:BMI088)
Accelerometer/Gyroscope: ICM-20689
Accelerometer/Gyroscope: ICM-20689(X7:ICM-20649)
Magnetometer: RM3100
Barometer: MS5611*2
Interfaces:
14 PWM outputs (12 supports Dshot)
Support multiple RC inputs (SBUs/CPPM/DSM)
Analogue/ PWM RSSI input
2 GPS ports(GPS and UART4 ports)
6 i2c buses(Four i2c dedicated ports)
2 CAN bus ports
2 Power ports(Power A is common adc interface, Power C is uavcan battery interface)