NEO 3 utilise une conception matérielle similaire à NEO V2 et met à niveau le module de navigation GNSS vers le module M9N qui prend en charge les quatre principaux systèmes de satellites Beidou, GPS, Galileo et Glonass. La précision de positionnement a été considérablement améliorée. Il s'agit d'un module de positionnement et de navigation sans pilote très rentable. Il intègre une boussole, un baromètre, un voyant d'état du contrôleur de vol, un buzzer et un interrupteur de sécurité en un seul appareil ; il présente les caractéristiques d'une sensibilité élevée et d'une forte anti-interférence.
Caractéristiques
Invite du buzzer
interrupteur de sécurité
Bus CAN
Baromètre MS5611
Voyant d'état RVB
Antenne à gain élevé quatre étoiles personnalisée CROCOMM
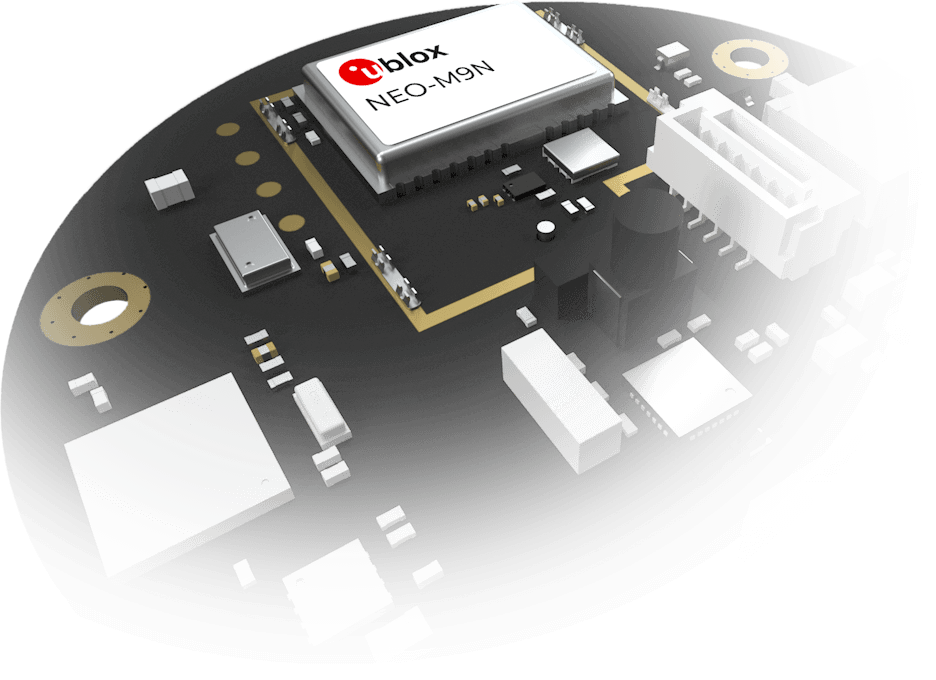
Récepteur satellite Ublox M9N
Récepteur satellite nouvelle génération Ublox M9N, la mesure réelle peut atteindre une précision maximale de 0,7 m.
Réception simultanée par les quatre systèmes satellites
Prend en charge la réception simultanée des quatre systèmes satellites Beidou, Galileo, Glonas et GPS
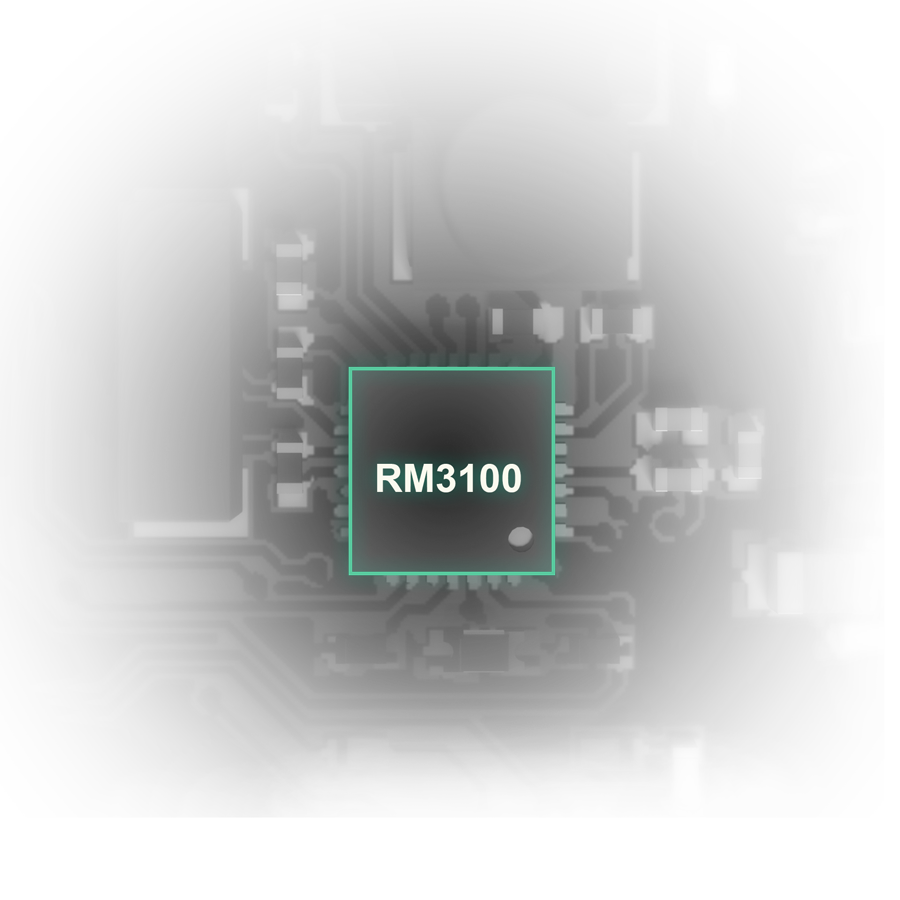
Capteur industriel RM3100
L'utilisation d'un capteur de qualité industrielle RM3100 offre de meilleures performances anti-interférences
Conception à triple filtre
NEO 3 Pro adopte une conception de triple filtre SAW+LNA+SAW, évitant efficacement l'influence de la télécommande, de la transmission de données, du signal 4G sur la réception du positionnement GPS
Ardupilot/PX4*(PX4 travaille toujours dur pour s'adapter à l'horloge)
Tension d'entrée
5V
Température de fonctionnement
-10~70℃
Taille
60*60*16MM
Poids
33g
Précision de niveau NEO 3 lorsque le système d'amélioration SBAS est activé, la précision nominale est de 1,5 m (par défaut) ; lorsque le système d'amélioration SBAS est désactivé, elle est de 2,0 m
NEO 3 prend en charge l'injection RTCM3.3, mais ne prend pas en charge la sortie RTCM ; il peut atteindre un différentiel de pseudo-portée (positionnement au niveau du compteur) mais ne prend pas en charge le différentiel de phase de porteuse (RTK), et il a besoin d'une station de base prenant en charge la sortie RTCM3.3.
Lorsque vous connectez NEO 3 à des pilotes automatiques d'autres marques (pilotes automatiques non CUAV), le buzzer ne fonctionnera pas. Si vous devez l'utiliser sur des pilotes automatiques d'autres marques, veuillez sélectionnerNÉO 3 Pro .
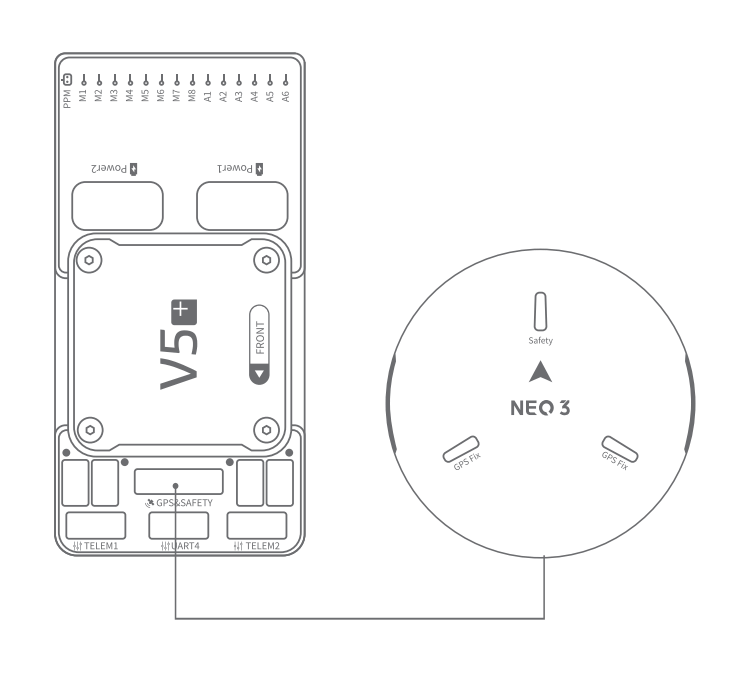
Réglages des paramètres du pilote automatique
Neo 3 est un module plug-and-play sans paramétrage.