Module GPS CUAV NEO 3 Pro | GNSS U-BLOX M9N CAN BUS
NEO poursuit la conception matérielle de NEO V2, met à niveau le module GNSS vers Ublox NEO M9N, prend en charge Beidou, Galileo, Glonas et la réception GPS en même temps, et la précision de positionnement horizontal est jusqu'à 0,7 M. Intégré avec interrupteur de sécurité, buzzer, lumière RVB.
Caractéristiques
Invite du buzzer
interrupteur de sécurité
Bus CAN
Baromètre MS5611
Voyant d'état RVB
Boussole industrielle RM3100
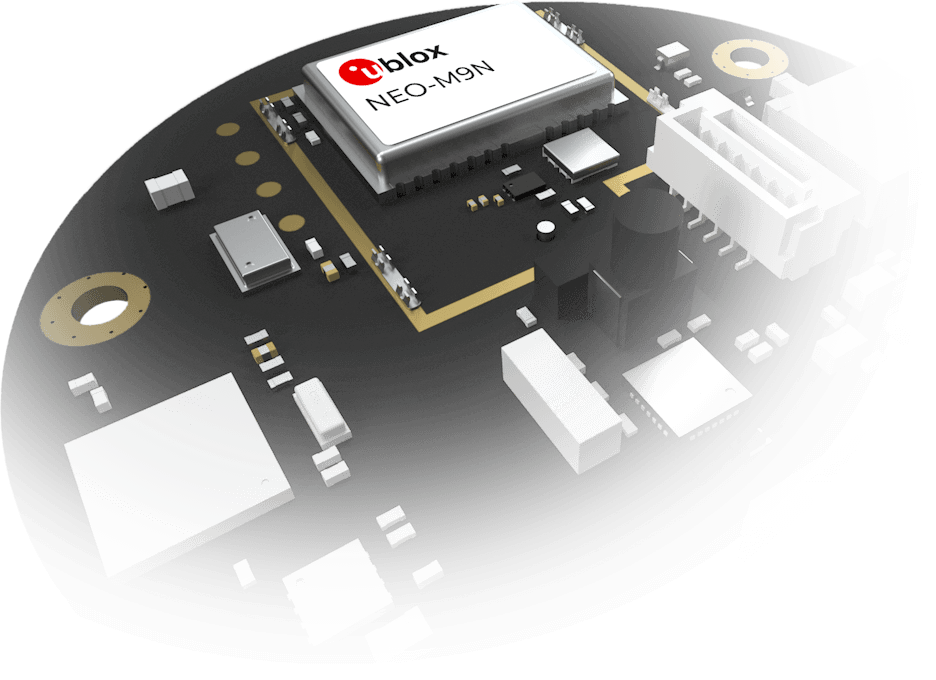
Récepteur satellite Ublox M9N
Récepteur satellite nouvelle génération Ublox M9N, la mesure réelle peut atteindre une précision maximale de 0,7 m.
Réception simultanée par les quatre systèmes satellites
Prend en charge la réception simultanée des quatre systèmes satellites Beidou, Galileo, Glonas et GPS
Unité de traitement hautes performances STM32F412
Capteur industriel RM3100
L'utilisation d'un capteur de qualité industrielle RM3100 offre de meilleures performances anti-interférences
Antenne personnalisée CROCOMM
Antenne spéciale à gain élevé quatre étoiles
Baromètre de haute précision intégré
Baromètre haute précision MS5611 intégré pour répondre aux besoins de différents scénarios d'application
Conception à triple filtre
NEO 3 Pro adopte une conception de filtre triple SAW+LNA+SAW, évitant efficacement l'influence de la télécommande, de la transmission de données, du signal 4G sur la réception du positionnement GPS
Programme open source, support de programme personnalisé
Ardupilot/PX4*(PX4 travaille toujours dur pour s'adapter à l'horloge)
Tension d'entrée
5V
Température de fonctionnement
-10~70℃
Taille
60*60*16MM
Poids
33g
Précision du niveau NEO 3 Pro lorsque le système d'amélioration SBAS est activé, la précision nominale est de 1,5 m (par défaut) ; lorsque le système d'amélioration SBAS est désactivé, elle est de 2,0 m
NEO 3 Pro prend en charge l'injection RTCM3.3, mais ne prend pas en charge la sortie RTCM ; il peut atteindre un différentiel de pseudo-portée (positionnement au niveau du compteur) mais ne prend pas en charge le différentiel de phase de porteuse (RTK), et il a besoin d'une station de base prenant en charge la sortie RTCM3.3.
Le firmware Ardupilot 4.0.0 et supérieur prend en charge NEO 3 PRO, et le firmware PX4 est encore en phase d'adaptation.
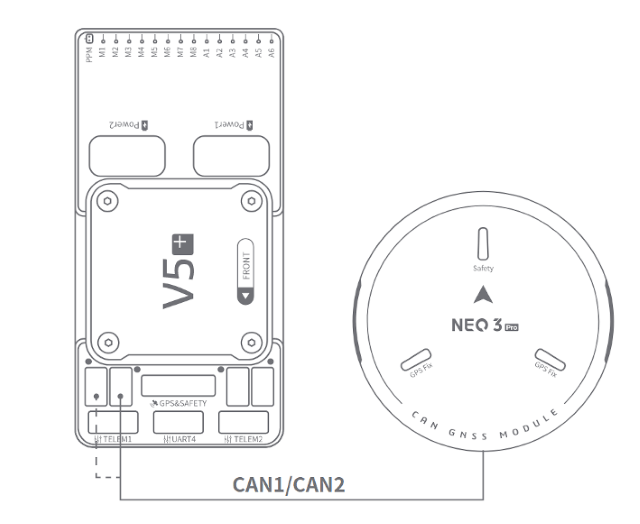
Veuillez le connecter à l'interface de contrôle de vol CAN1 / CAN2 (CAN1 est recommandé)
La connexion des autres contrôleurs de vol PIX est la même.
Réglages des paramètres du pilote automatique
Vous devez définir les paramètres de contrôle de vol pour activer Neo 3 pro ; il existe différentes méthodes de réglage selon le micrologiciel de contrôle de vol.
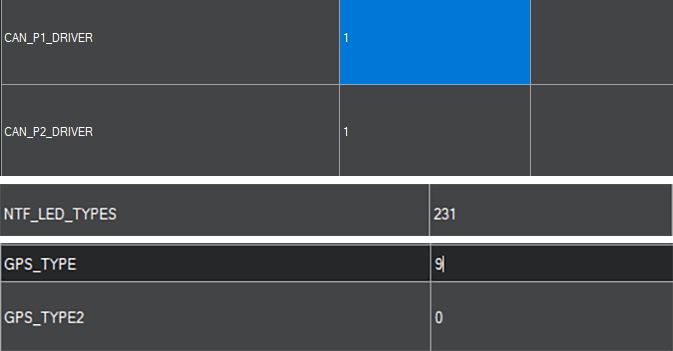
Micrologiciel ArduPilot
Définissez les paramètres suivants dans toutes les tables de paramètres du planificateur de mission et redémarrez après l'écriture